

Curved intestinal visual navigation method for double hemispherical capsule robot
A capsule robot and visual navigation technology, applied to endoscopy, proctoscopy, rectal electron microscopy, etc., can solve the problems of inability to navigate, inability to control the capsule double hemisphere capsule robot, and high missed detection rate.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
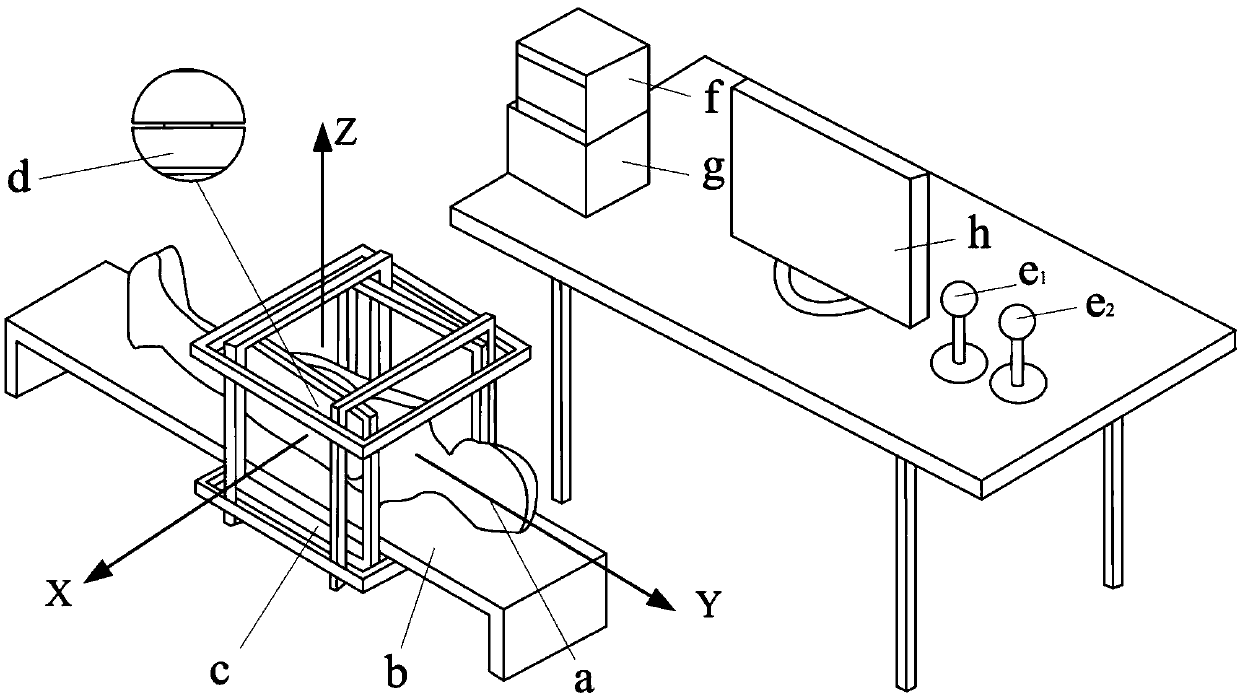
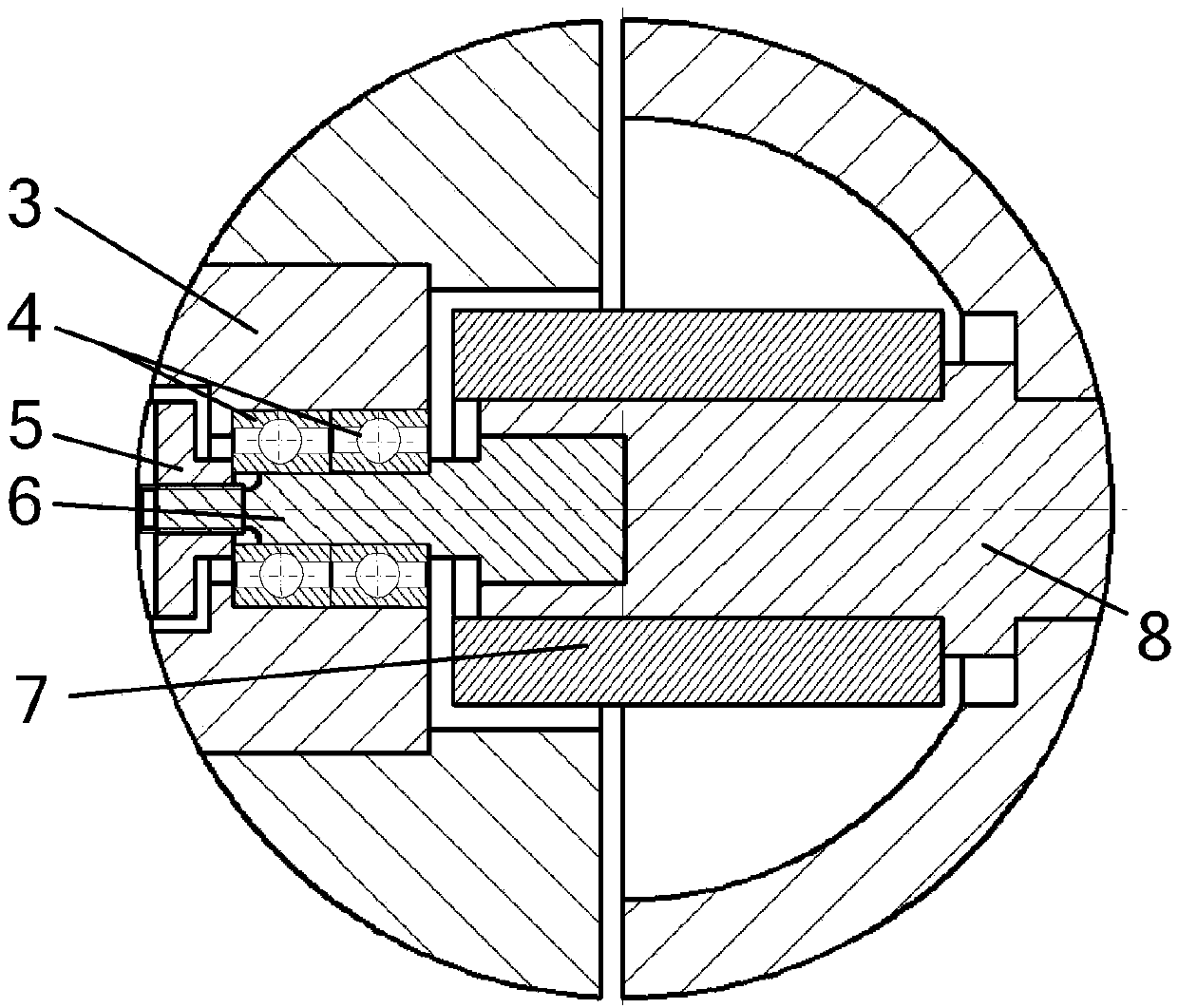
[0070] (1) When the dual hemispherical capsule robot is at position A, such as image 3 As shown, through the vertical angle sensor, the rotation angle of the camera around the axis of the dual hemispherical capsule robot is α=65°.
[0071] (2) Read the magnetic vector directions θ=50° and δ=75° from the magnetic field controller at this time, and combine the rotation angle α=65° of the camera around the axis of the dual-hemispheric capsule robot to determine the current dual-hemispherical capsule robot Pose information relative to a fixed coordinate system.
[0072] (3) According to the image captured by the camera, use the image processing method to extract the center of mass of the dark area, and calculate the pixel coordinates of the center of mass of the dark area, and use it as the turning navigation point of the intestinal tract. The center of mass of the dark area is as follows: Figure 8 As shown, the pixel coordinates of the centroid of the dark area are (520, 135)....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More