

Wireless power distribution system applied between joints of reconfigurable space mechanical arm
A space manipulator and wireless power distribution technology, applied in the direction of electrical components, circuit devices, etc., can solve problems such as limited range of motion, complex structure, and inability to distribute power
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
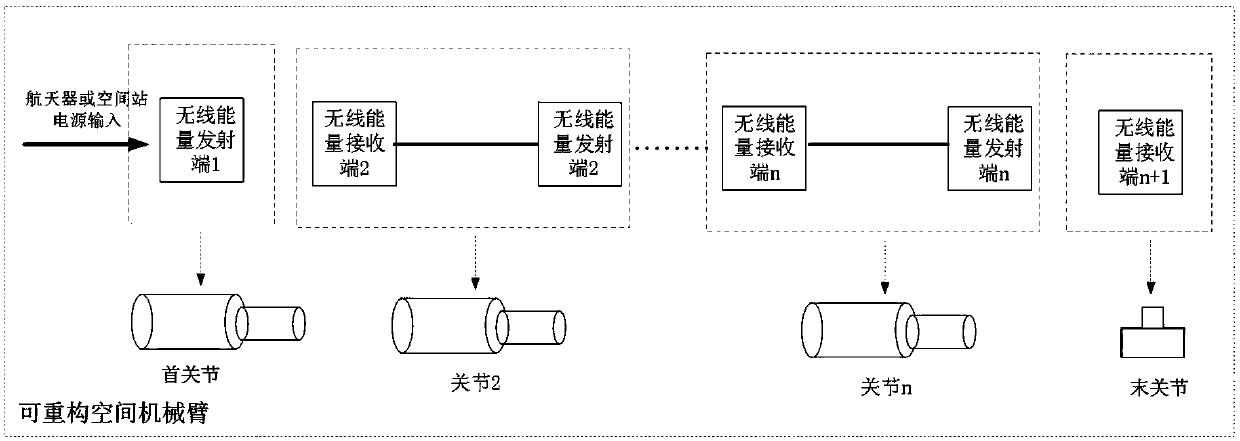
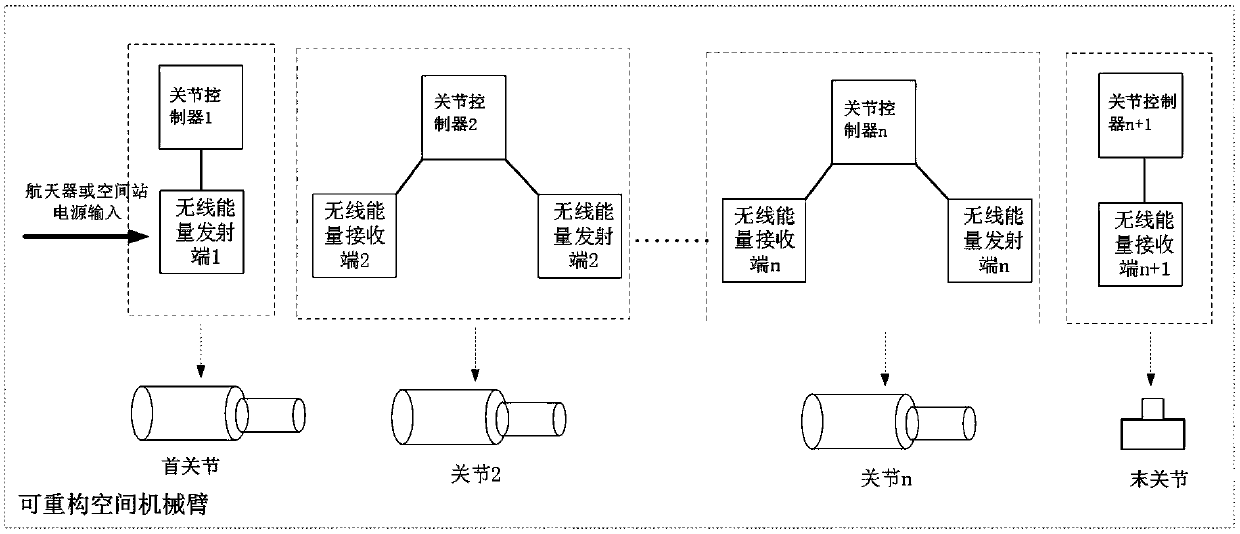
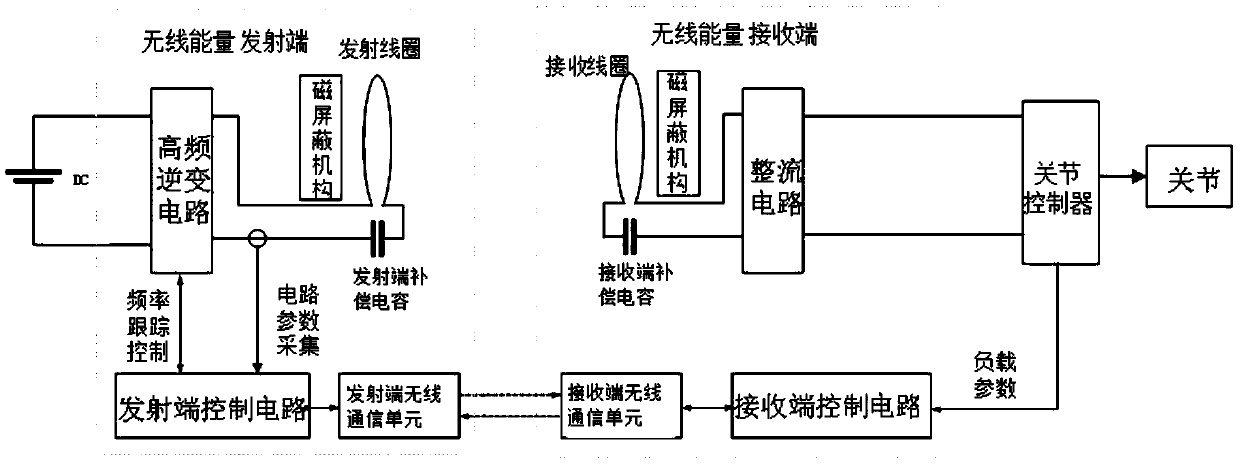
[0029]The invention relates to a wireless power distribution system applied between the joints of a reconfigurable space manipulator, including a wireless energy receiving end and a wireless energy transmitting end that are arranged in each joint of the reconfigurable space manipulator and are connected to each other. The first joint is only equipped with a wireless energy transmitter and the last joint is only equipped with a wireless energy receiver. The wireless energy transmitter performs voltage conversion based on high-frequency inverter technology and provides high-frequency energy to the wireless energy receiver. The wireless energy receiver Receive high-frequency energy and use rectification technology for voltage regulation to realize rectification voltage regulation control and signal acquisition. Magnetic induction coupling for wireless power transmission and data interaction through wireless communication, effectively realizes power transmission and data interactio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More