

A sensorless collision detection method for robotic manipulators based on motor current
A technology of collision detection and motor current, applied in manipulators, program-controlled manipulators, instruments, etc., can solve problems such as acceleration containing noise, difficulty in estimating, and complex dynamic models of robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
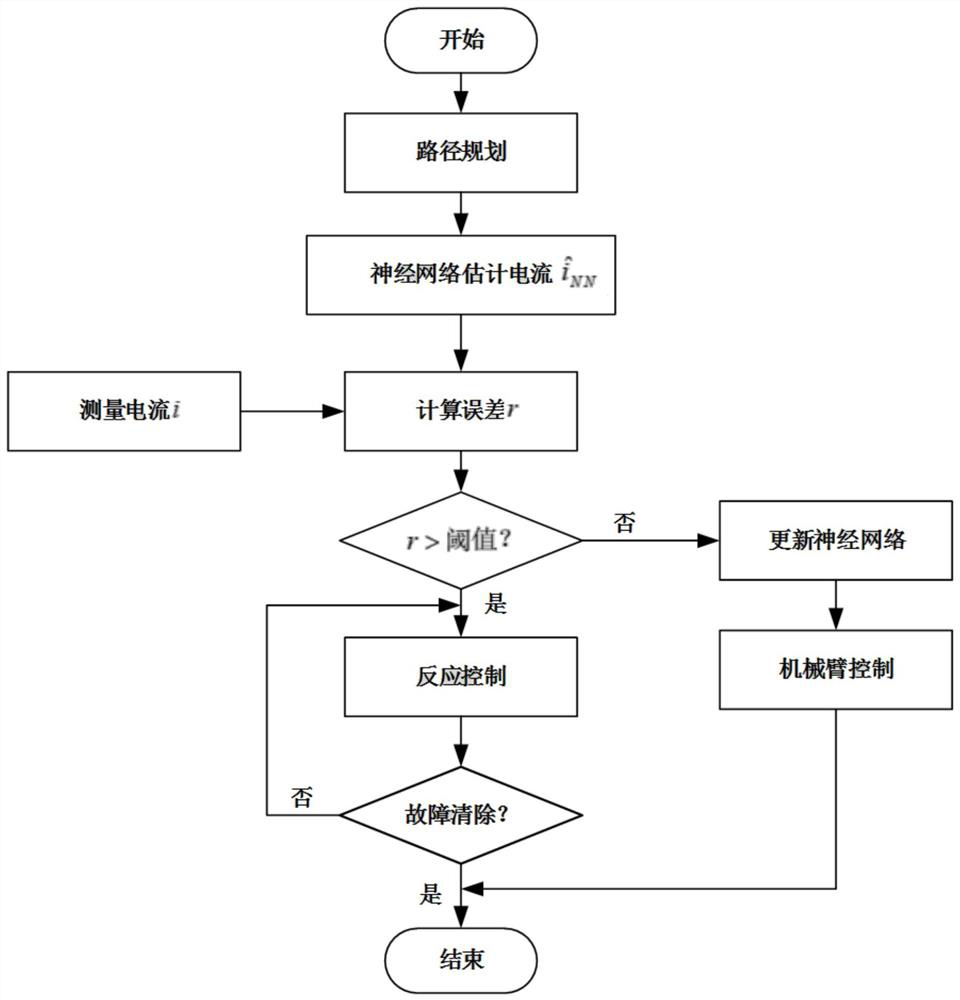
[0035] The present invention provides a sensorless collision detection method of a robot manipulator based on motor current, by calculating the error between the output current of the manipulator joint motor and the estimated current output by the neural network, and comparing it with the predetermined threshold in the collision detection module Make a comparison to determine the occurrence of a collision.
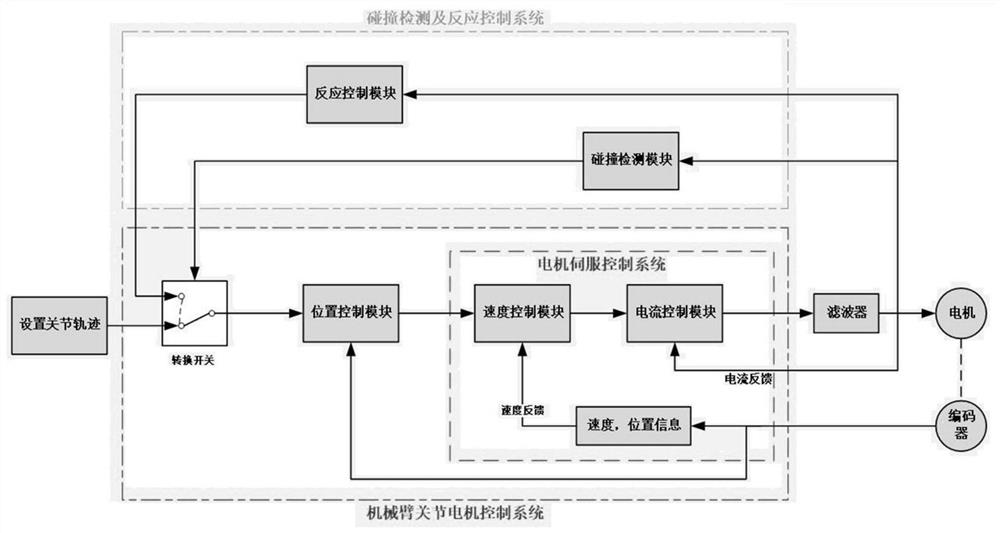
[0036] See figure 1 , A sensorless collision detection system for a robot manipulator based on motor current, including a manipulator joint motor control system, a filter, a collision detection and response control system, a motor, and an encoder. The manipulator joint motor control system includes a switch, The position control module and the motor servo control system. The motor servo control system includes a speed control module and a current control module. The collision detection and reaction control system includes a reaction control module and a collision detection mod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More