

Unmanned aerial vehicle UAV control law parameter adjusting method
A UAV, control law technology, applied in special data processing applications, instruments, electrical digital data processing, etc., can solve the problems of not building a module library, imperfect flight control system design and simulation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
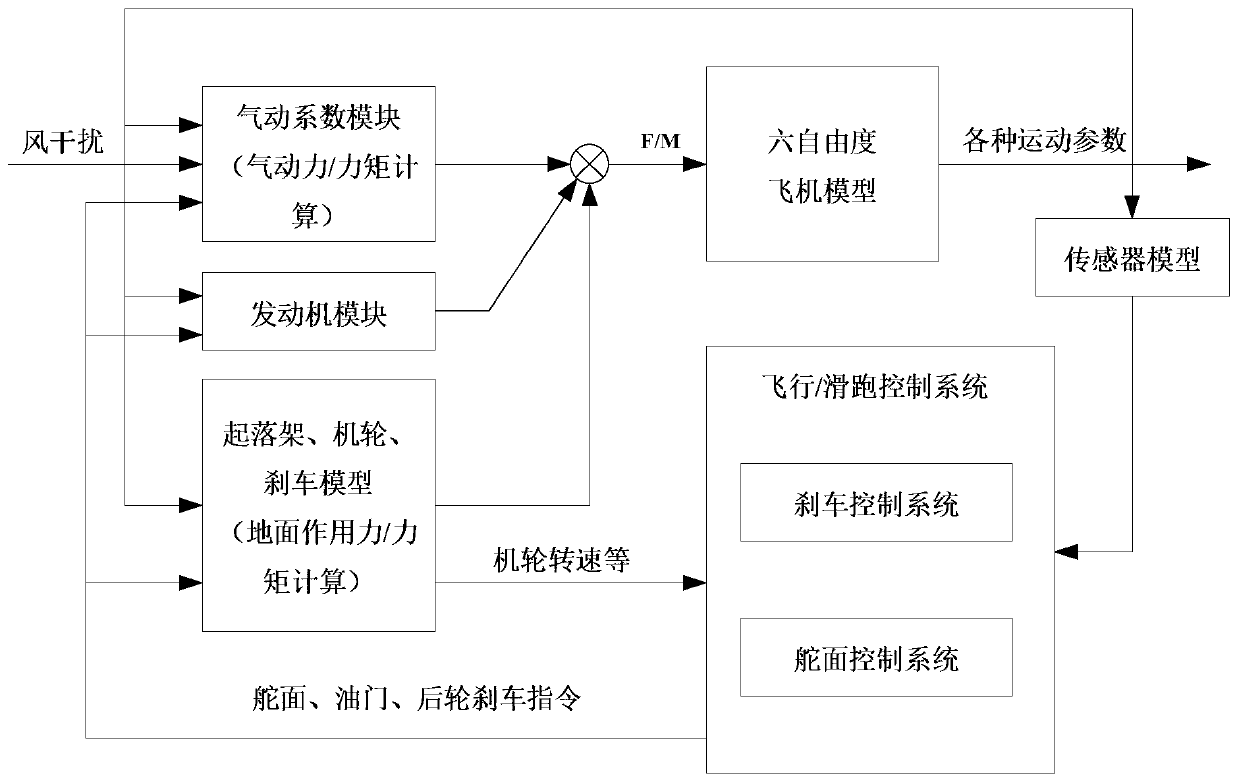
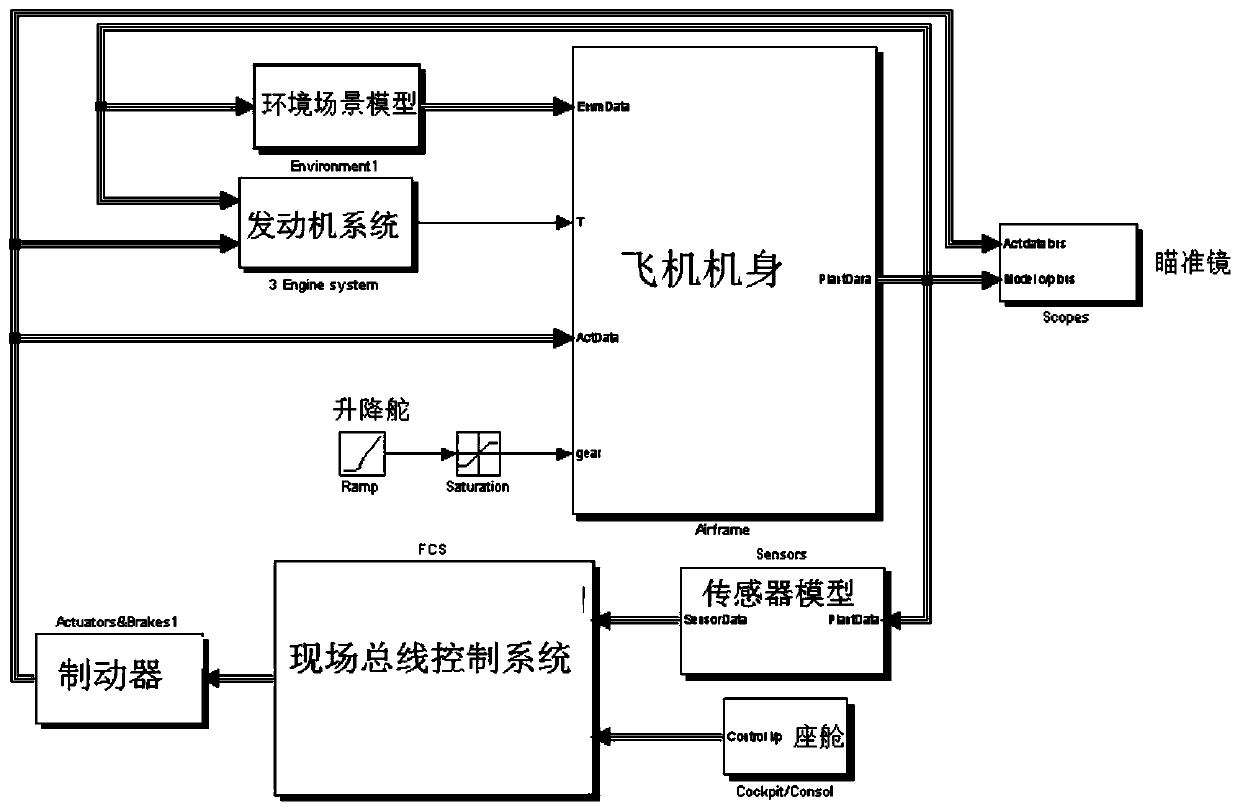
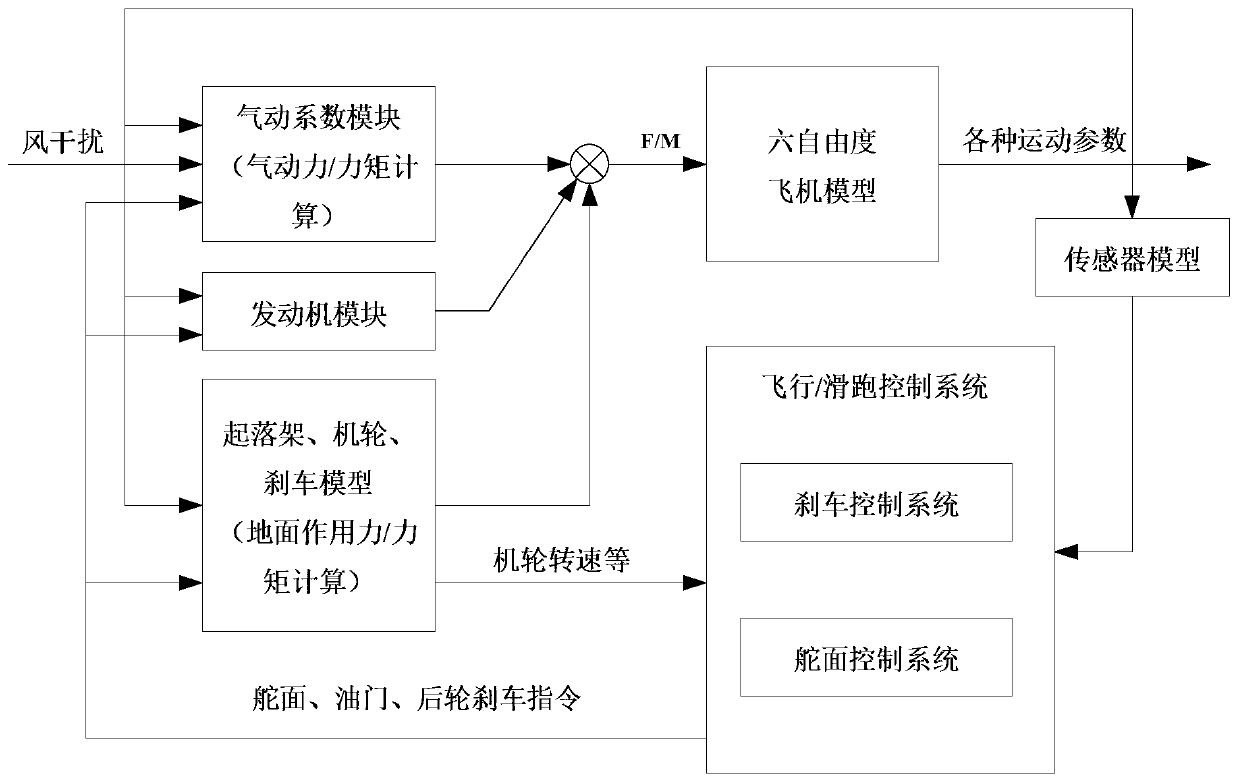
[0016] refer to figure 1 . According to the present invention, the UAV UAV control law parameter adjustment method has the following technical characteristics: using Matlab as a tool, based on the flight control system, the general console, aerodynamic coefficient module, engine module, Landing gear, wheel, brake model, pitch angle local controller at the balance point of the UAV, steering gear model, six-degree-of-freedom aircraft model, sensor model, environmental variables and a general module library of the oscilloscope module, and all designed The parameters are loaded into the Matlab simulation environment in the form of file reading and writing, and the optimized embedded real-time simulation code is automatically generated, the model parameters are adjusted online and the simulation data is monitored, and the simulation structure diagram of the corresponding mode packaged is called out; The bus control system FCS calculates the control law, throttle position command a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More