

Line structure cursor calibration method based on projection geometry
A calibration method, line structured light technology, applied in the testing of machine/structural components, optical instrument testing, image analysis, etc., can solve the problems of high target requirements, unsuitable for on-site calibration, complicated operation, etc., and achieve improved fitting Accuracy, reducing the accumulation of errors, and the effect of simple and easy operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
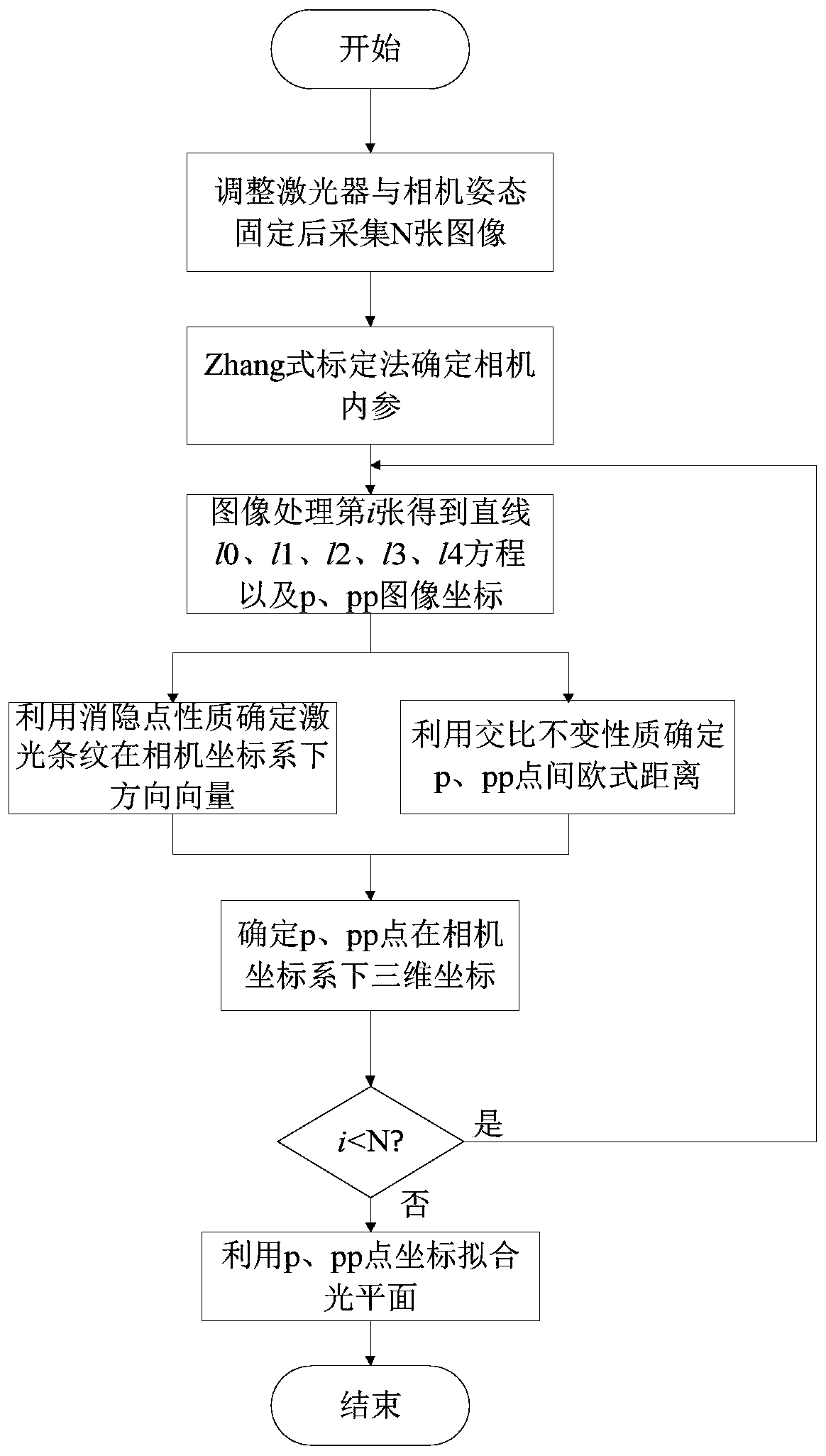
[0041] Such as figure 1 As shown, a line-structured cursor calibration method based on projective geometry, including
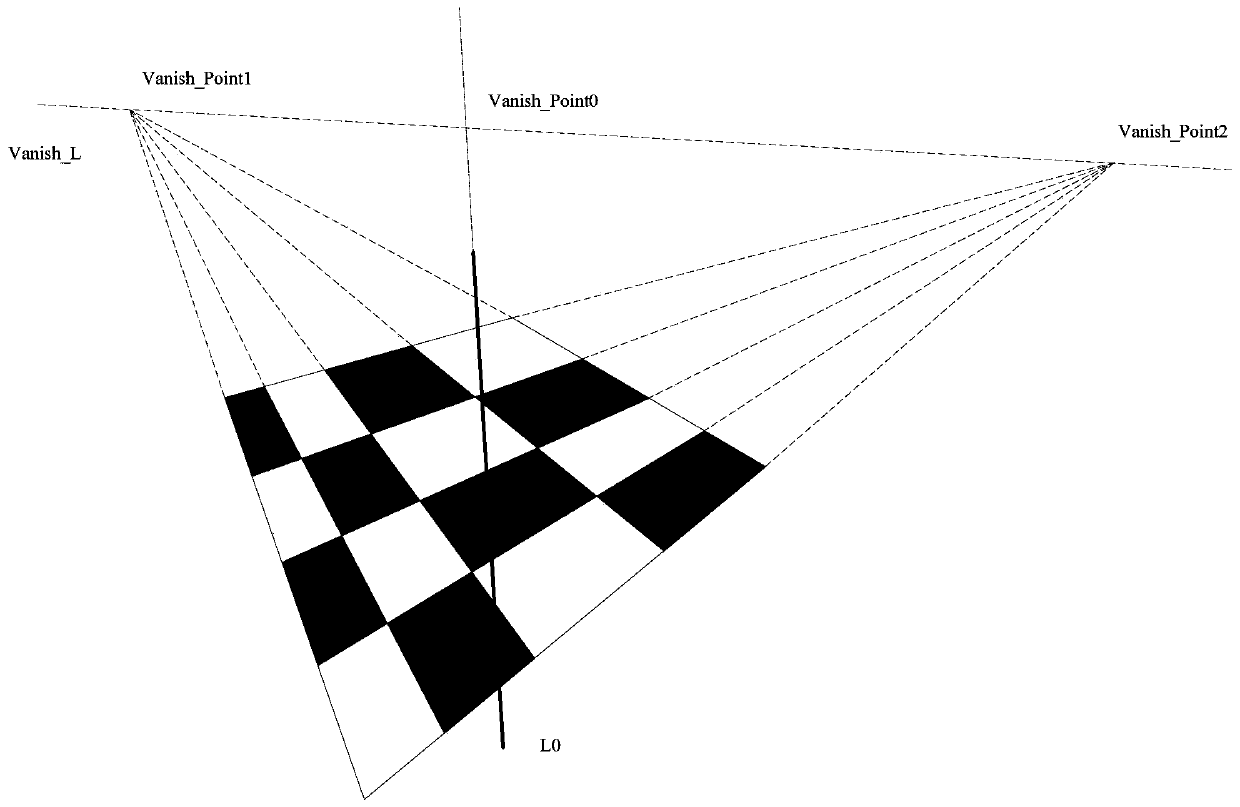
[0042]The first step, after fixing the positions of the camera and the line laser, place the checkerboard target in the field of view of the camera. The checkerboard serves as a calibration plate, and the line laser hits the calibration plate to form stripes. The camera collects images and saves them in the computer, and adjusts the target position. Attitude, repeat the operation, and collect N (20-30) images;
[0043] In the second step, Zhang's calibration method is used to calibrate the internal participation distortion coefficient of the collected target image, and the internal parameter matrix K and the distortion coefficient vector K are obtained. c :
[0044]
[0045] K c =[r 1 r 2 p 1 p 2 0] (2)
[0046] Among them, f x normalized focal length for the x-axis, f y is the normalized focal length for the y-axis, (u 0 ,v 0 ) is the imag...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More