

Mechanical arm kinematics parameter calibration method based on measuring of laser tracker
A technology of kinematic parameters and laser tracker, which is applied to manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as poor space adaptability, unaccounted for errors, and difficulty in measuring terminal attitudes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] The specific embodiments of the present invention will be described in detail below in conjunction with the technical solutions and accompanying drawings.
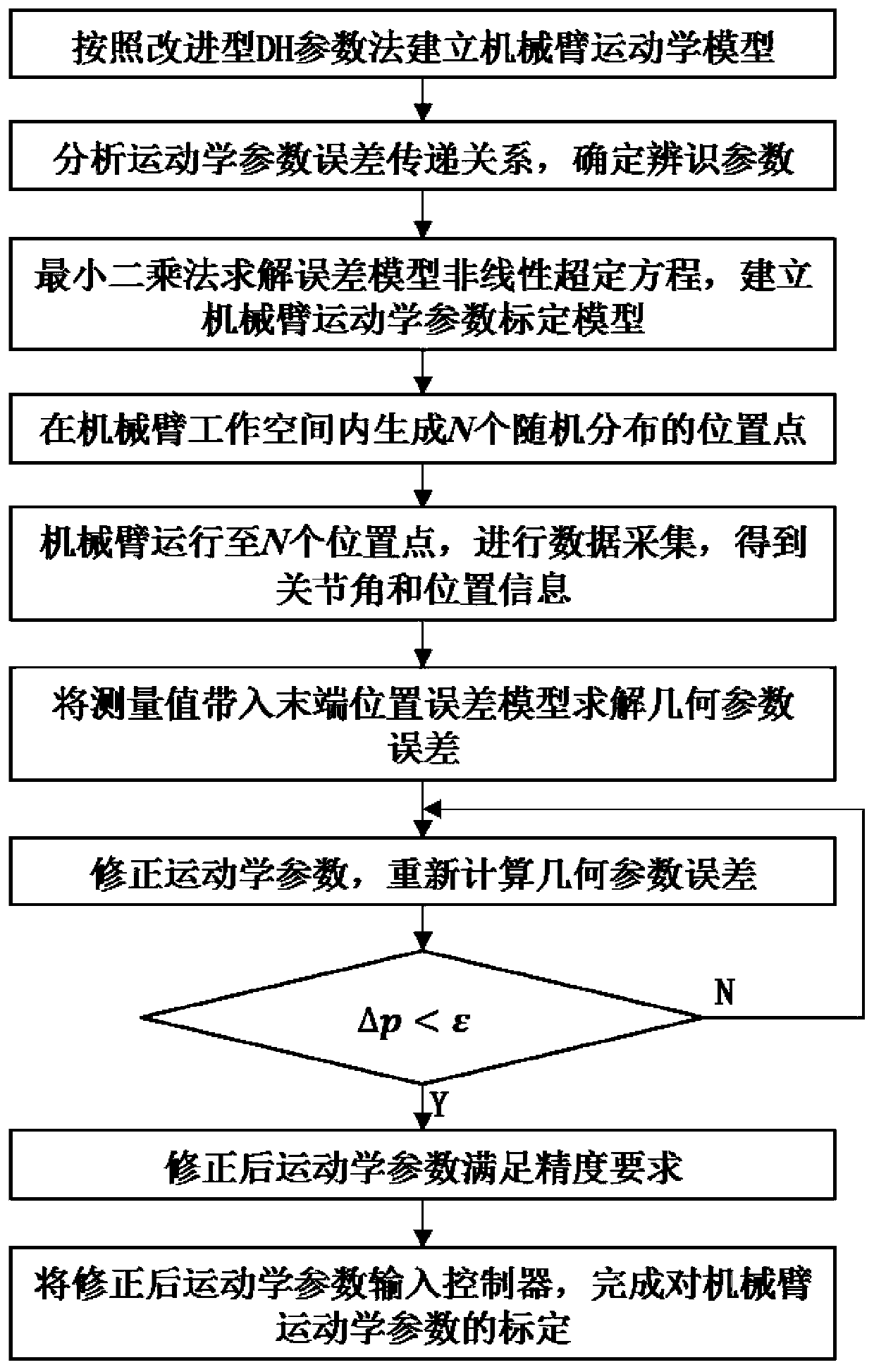
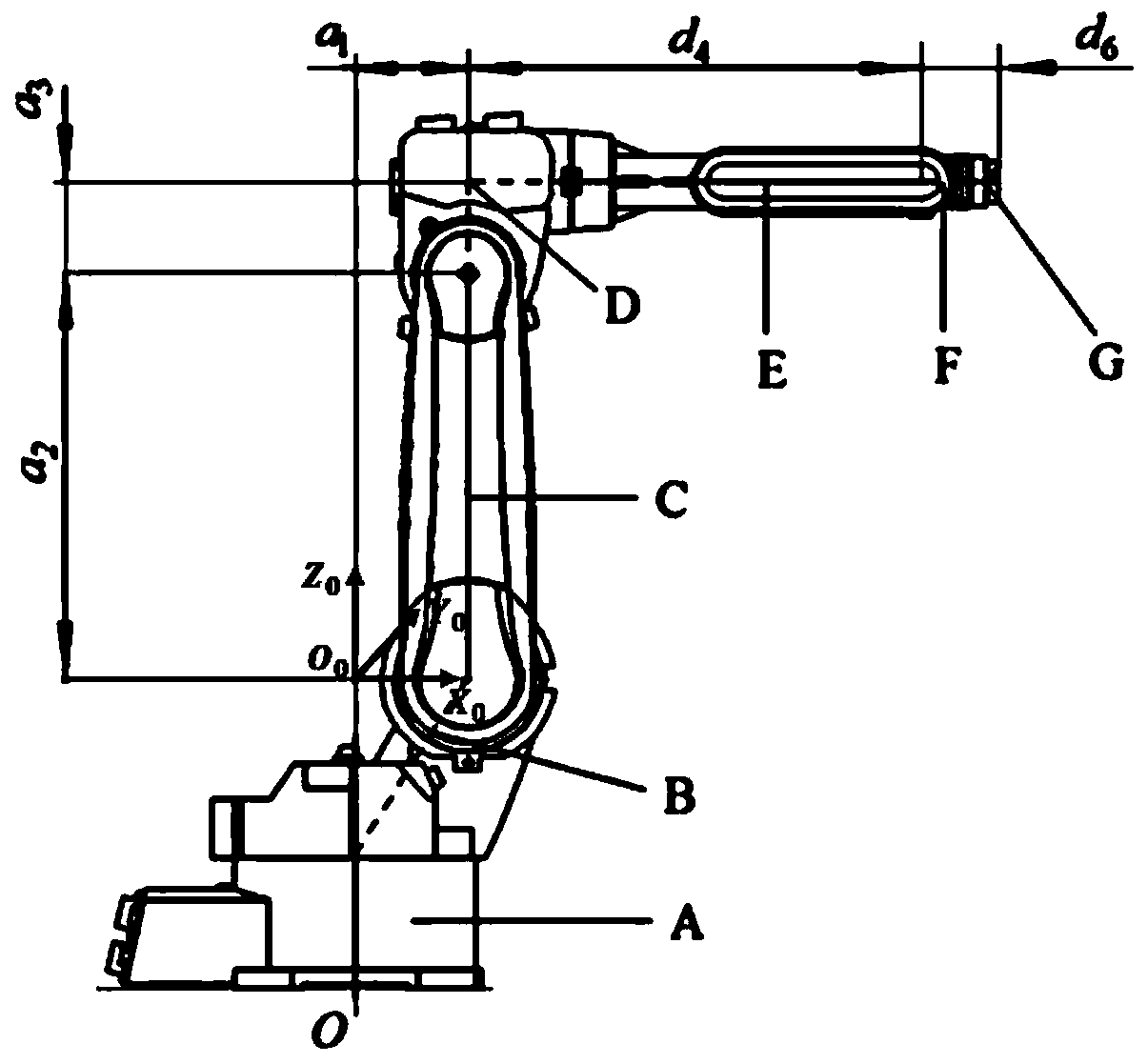
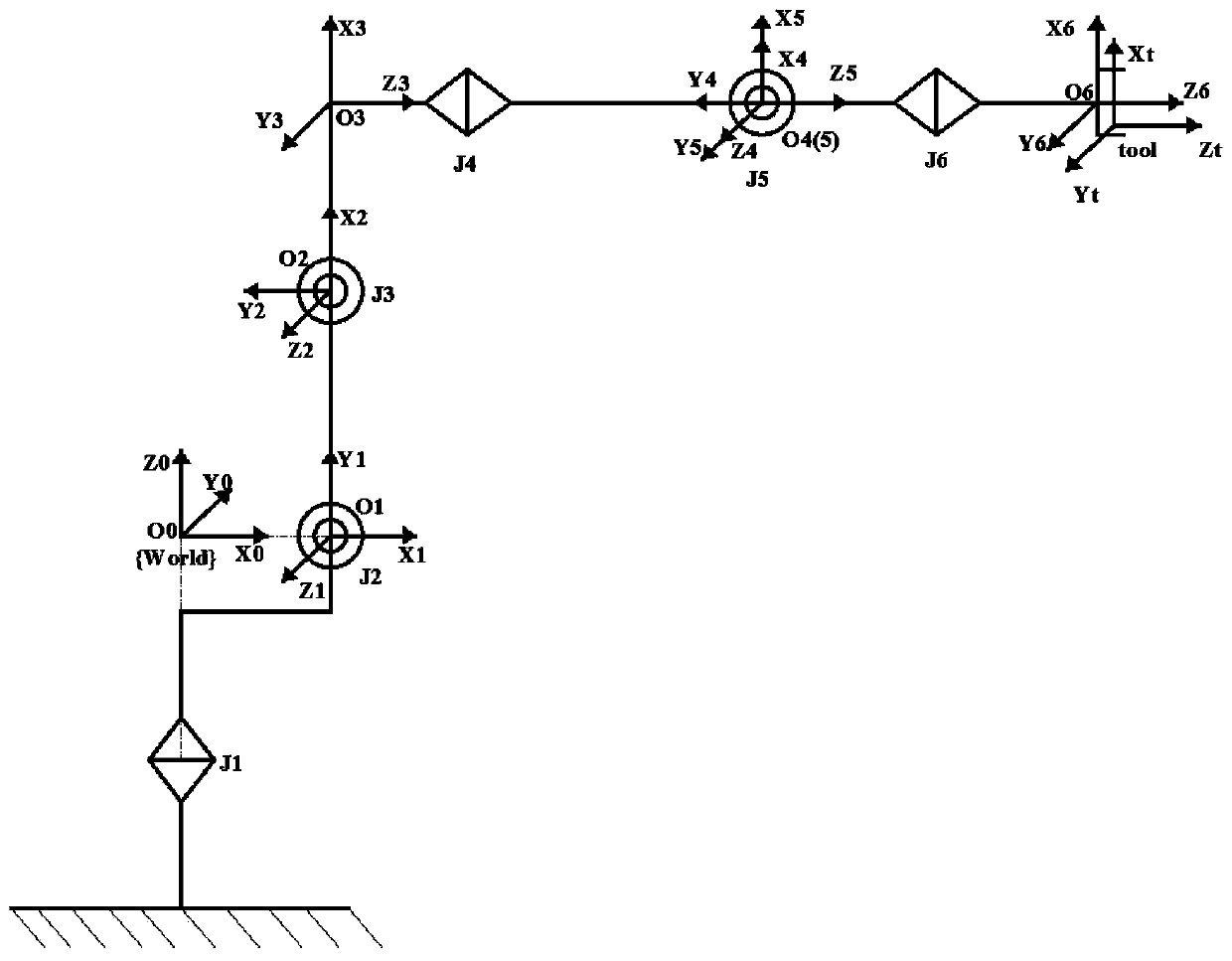
[0071] attached figure 1 It is a flow chart of the method for calibrating the kinematics parameters of the manipulator based on laser tracker measurement in the present invention, with figure 2 It is a schematic diagram of the structure of the articulated six-degree-of-freedom manipulator, and the joint coordinate system of the articulated six-degree-of-freedom manipulator is as attached image 3 As shown, the layout of the Leica laser tracker and the mechanical arm at the measurement site in this embodiment is as attached Figure 4 As shown, the target ball adapter plate used at the end of the industrial robot arm is as attached Figure 5 shown. The specific steps of the calibration method flow are as follows:
[0072] Step 1: Construction of the kinematics model of the six-degree-of-freedom articulated manipu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More