

Map building method and system based on data fusion of two laser radars as well as map
A technology for radar data and map construction, applied in radio wave measurement systems, re-radiation of electromagnetic waves, utilization of re-radiation, etc., can solve the problems of insufficient representation of surrounding environment information, inability to meet real-time requirements, and large amount of calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
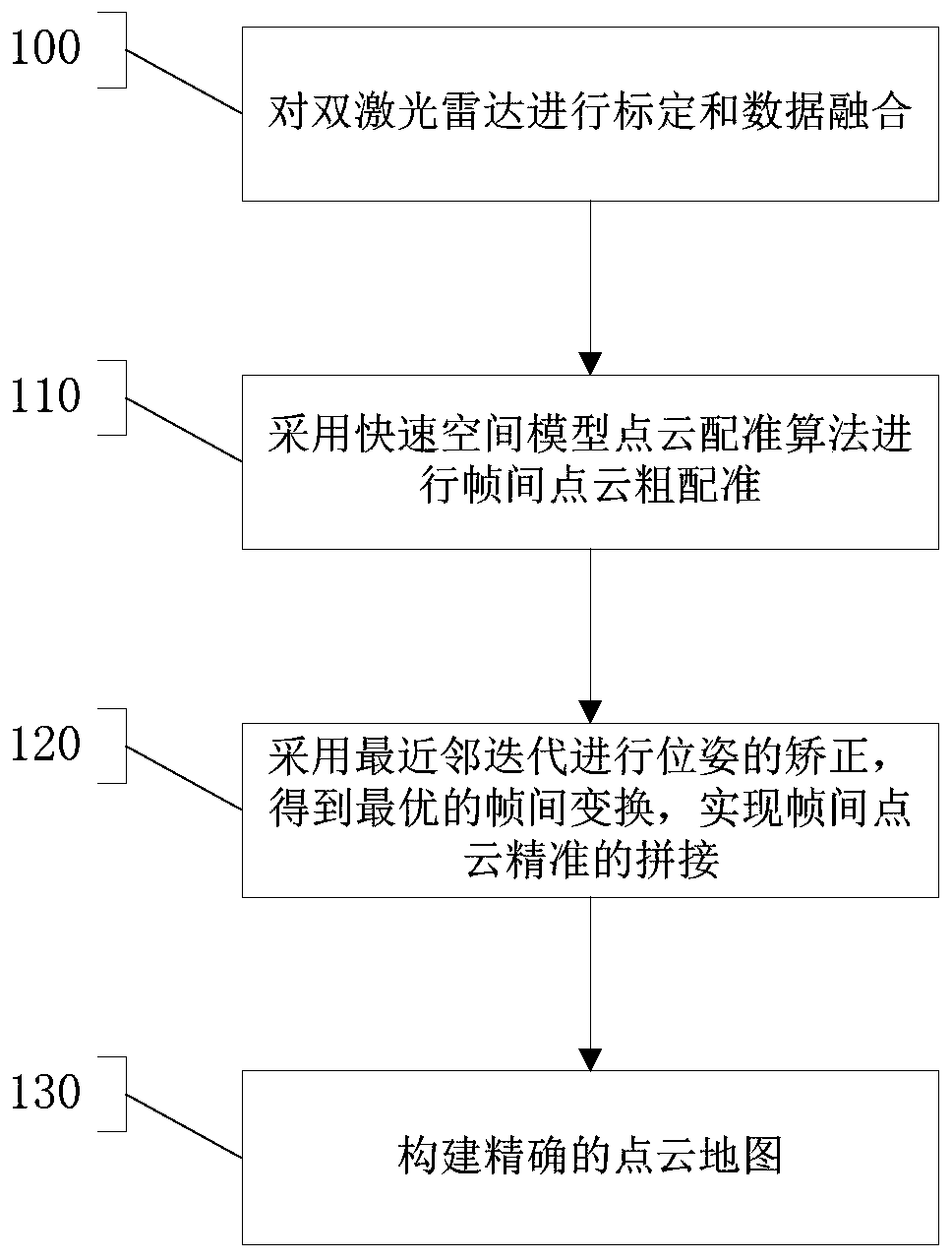
[0078] like figure 1 , 2 As shown, step 100 is executed, and the dual-radar calibration module 200 performs calibration and data fusion on the dual-lidar. The dual laser radar calibration refers to calibration of two laser radars at different positions, including spatial synchronization and / or time synchronization. Spatial synchronization refers to physical calibration, with one laser radar as the center, and the other laser radar adjusts the angle value and direction value for calibration to scan the same obstacle for spatial calibration. Space calibration is to use the rotation matrix and translation matrix of the three-dimensional coordinate system. The rotation of the three-dimensional coordinate system is expressed as the product of a vector and a square matrix of appropriate size. Set a vector in the 3D coordinate system The projections of point P on the XY plane, XZ plane, and YZ plane are point M, point Q, and point N respectively, Rotate the angle θ around the Z...
Embodiment 2
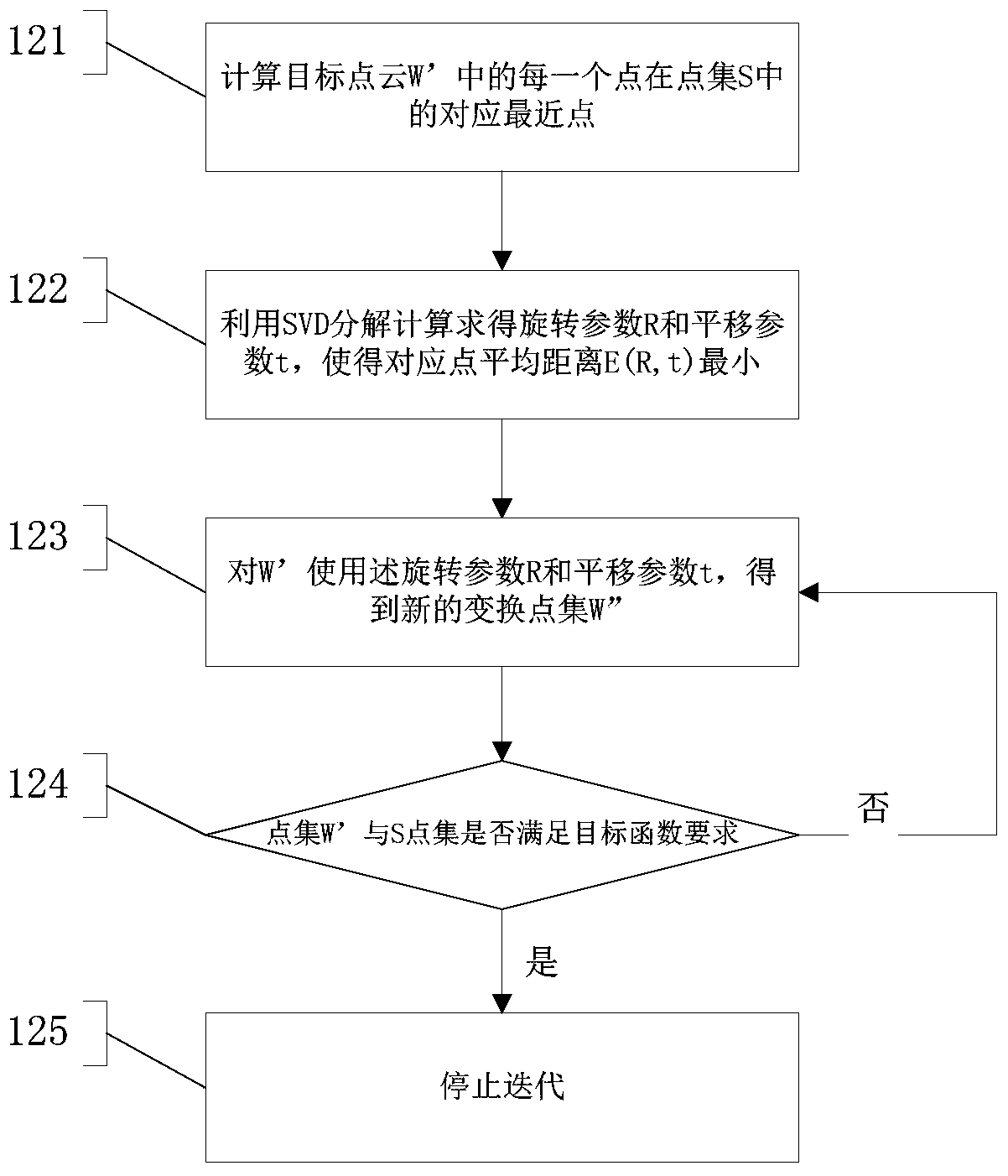
[0084] The present invention proposes a map construction method for dual laser radar data fusion. Firstly, the dual laser radars are calibrated and data fused; Secondly, the nearest neighbor iteration is used to correct the pose, and the optimal inter-frame transformation is obtained to realize the splicing of inter-frame point clouds; finally, the accurate point cloud map construction is completed.
[0085] 1. Dual laser radar calibration and data fusion:
[0086]Firstly, two laser radars in different positions are calibrated, including space synchronization and time synchronization. Spatial synchronization is to perform physical calibration, with one of the lidars as the center, and the other lidar adjusts the angle value and direction value for calibration to scan the same obstacle for spatial calibration. The time synchronization uses the ROS (Robot Operating System, robot operating system) mechanism to simultaneously receive the dual laser radar point cloud data, and the...
Embodiment 3
[0123] The invention proposes a map construction method for dual laser radar data fusion, including dual laser radar calibration and data fusion; based on a high-precision point cloud registration algorithm, inter-frame point cloud splicing is realized, and the completion accuracy is high The construction of the point cloud map.
[0124] 1. The present invention adopts dual laser radar data fusion to construct the map of unmanned vehicles. The dual laser radar supplements the characteristics of insufficient point cloud information of single laser radar, and provides relatively rich point cloud information for the construction of point cloud maps. For this reason, the present invention relates to calibration of dual laser radars and a point cloud information fusion method after calibration.
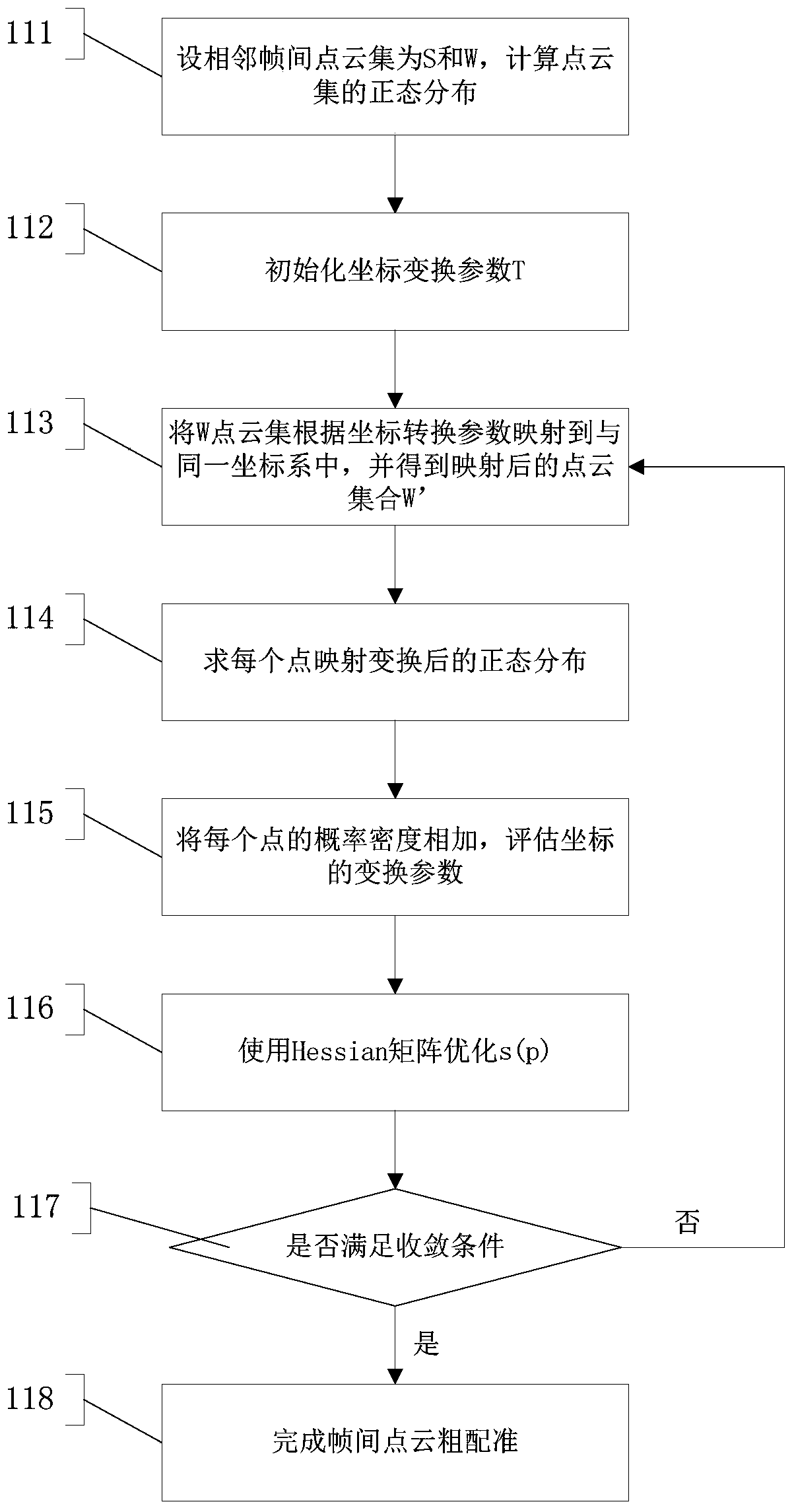
[0125] 2. The present invention proposes a two-step inter-frame point cloud registration algorithm, which realizes precise splicing of inter-frame point clouds, and then completes the cons...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More