

Loop control nerve experiment system for insect robot
A loop control and experimental system technology, applied in biological neural network models, user/computer interaction input/output, instruments, etc., can solve problems such as clock synchronization, data heterogeneity, etc., to improve synchronization, facilitate display and Effects of processing, improving scalability and reusability of data
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] In order to have a clearer understanding of the technical features, purposes and effects of the present invention, the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
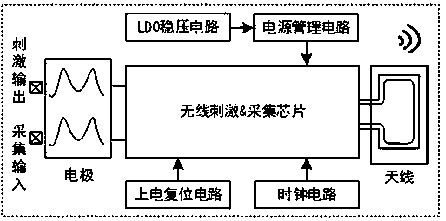
[0021] figure 1 It is the structural diagram of the insect knapsack integrating stimulation and collection of the present invention. Due to the particularity of insects and strong flight constraints, high requirements are put forward for the design of the knapsack in terms of low power consumption, small size and ultra-low power radio frequency transmission. Require. The ultra-lightweight backpack adopts flexible processing technology, integrates nerve stimulation and acquisition chips with low power consumption of 100 microwatts, micro antennas with high transmission conversion efficiency, batteries, etc., effectively reduces the size and weight of the backpack, and greatly improves the performance of the backpack. battery life.
[0022]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More