Ultra-short baseline positioning method based on adaptive unscented Kalman filter
An ultra-short baseline positioning and unscented Kalman technology, applied in the field of positioning, can solve the problems of limited positioning accuracy improvement, cumbersome operation, and high cost, and achieve the effect of reducing signal loss and improving positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0047] The present invention will be further described in detail below with reference to the drawings and embodiments.
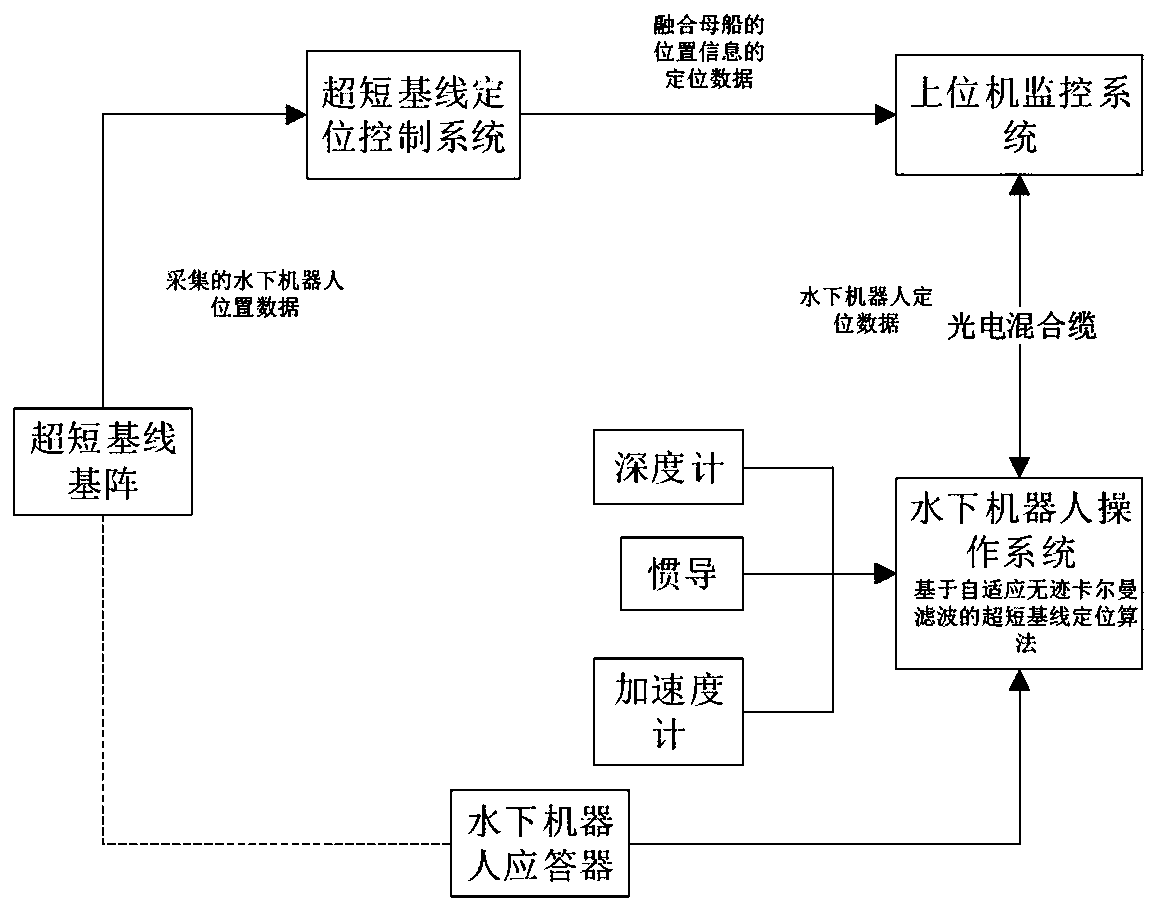
[0048] The invention is composed of a cabled underwater robot, a mother ship, an ultra-short baseline positioning matrix, and a host computer monitoring system. The cabled underwater robot is equipped with an inertial navigation and accelerometer, which is composed of: figure 2 Shown.
[0049] The ultra-short baseline array sends out a positioning signal. The transponder of the underwater robot receives the positioning signal and returns a response signal. After the response signal is collected by the ultra-short baseline receiving array, the fusion mother ship position information is sent to the host computer monitoring system. The monitoring system sends the positioning information back to the underwater robot through the photoelectric hybrid cable; the underwater robot fuses the ultra-short baseline positioning signal with the accelerometer and the inertial n...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More