

ROS-based simulation method for autopilot of fixed-wing unmanned aerial vehicle
An autopilot and simulation method technology, applied in the field of UAV flight, can solve problems such as inability to adapt to requirements and complex tasks, and achieve the effect of improving scalability and solving poor simulation visual effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] In order to enable those skilled in the art to better understand the technical solutions of the present invention, the present invention will be further described in detail below in conjunction with specific embodiments.
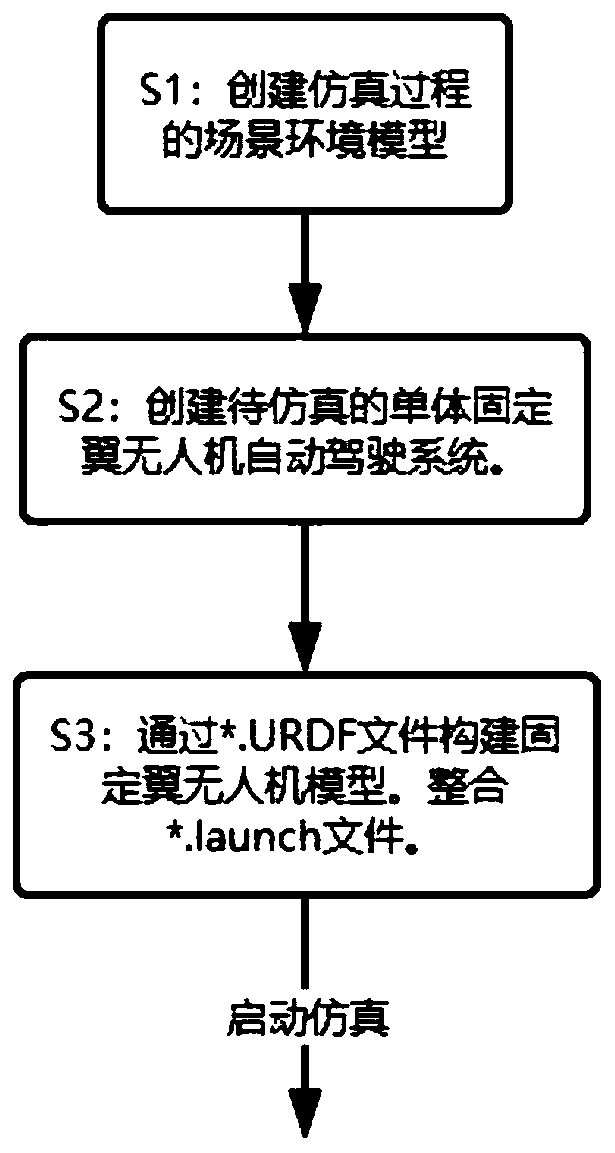
[0030] The embodiment of the present invention provides a simulation system of a ROS-based fixed-wing unmanned aerial vehicle autopilot, figure 1 For the simulation step flow chart of the present invention, comprise the following steps:
[0031] S1: Create a scene environment model of the simulation process to achieve a more realistic and real physical simulation with a better viewing angle. There are 3 methods available:
[0032] (1) Build the scene environment model directly in Gazebo. Cubes, spheres, and cylinders can be quickly added above the rendering window, and more complex models can be added through the Gazebo model database, including but not limited to robots, tables, chairs, and buildings. The pose of each model can be adjusted by tran...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More