

Cutting machining robot static error compensation and dynamic stiffness model correction method
A static error and cutting processing technology, which is applied in the direction of manipulators, manufacturing tools, program control manipulators, etc., can solve the problems of low repeat positioning accuracy, poor stiffness, cumbersome error analysis and control, etc., to reduce the difficulty of implementation, improve precision, and solve the problem of machining The effect of poor precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
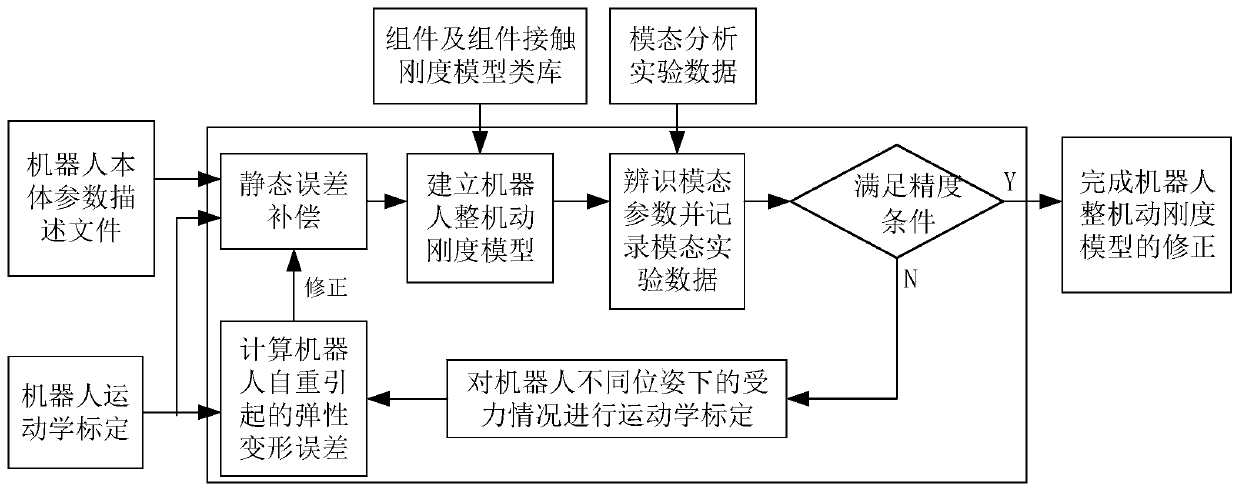
[0069] combined with figure 1 , this embodiment proposes a method for static error compensation and dynamic stiffness model correction of a cutting robot. The implementation process of this method includes:
[0070] Step S100 , perform kinematic calibration on the robot according to the description file of the robot body parameters, identify the structural parameters of the robot, perform static error compensation, and record measurement and calculation data during the calibration process.
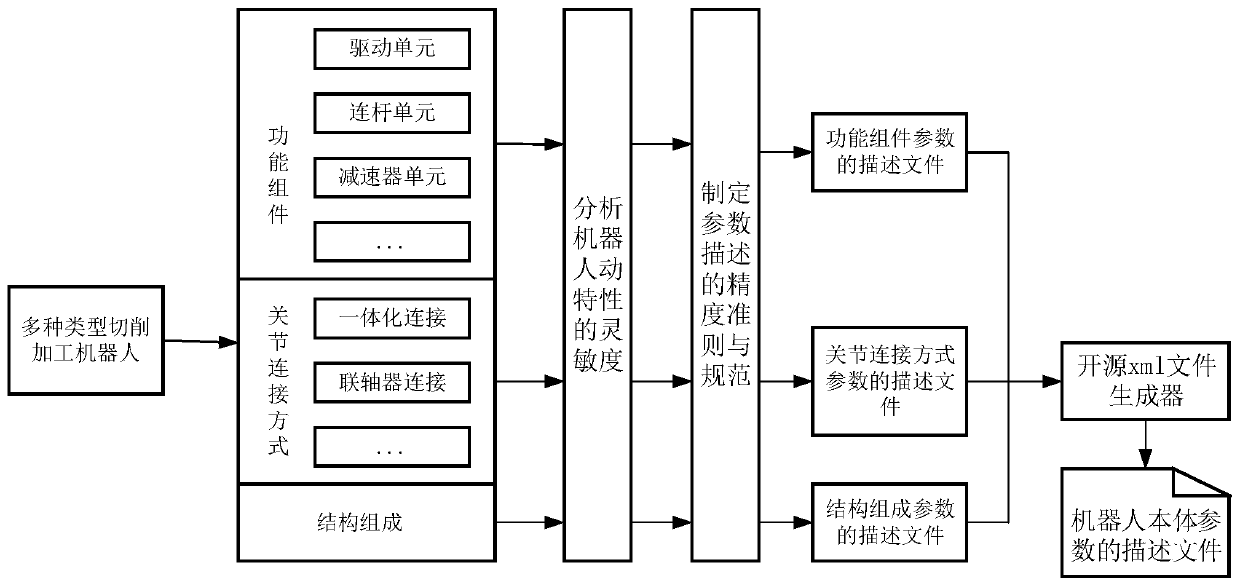
[0071] combined with figure 2 , in step S100, the description file of the robot body parameters involved is a normative file that can completely describe the robot body parameters, and the generation process of the description file includes:
[0072] S101. Analyze the sensitivity of the dynamic characteristics of the robot according to the structural parameters of the robot. The structural parameters include three types: functional components, joint connection methods, and structural com...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More