

Four-wheel independent drive electric vehicle reference vehicle speed fault-tolerant adaptive estimation method
A four-wheel independent drive, self-adaptive estimation technology, applied in complex mathematical operations, geometric CAD, etc., can solve the problems of speed sensor acquisition, lack of effective countermeasures for measurement noise, abnormal sensor signal values and insufficient consideration of communication errors, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0090] The present invention will now be described in further detail with reference to the drawings. These drawings are all simplified schematic diagrams, which merely illustrate the basic structure of the present invention in a schematic manner, so they only show the structures related to the present invention.
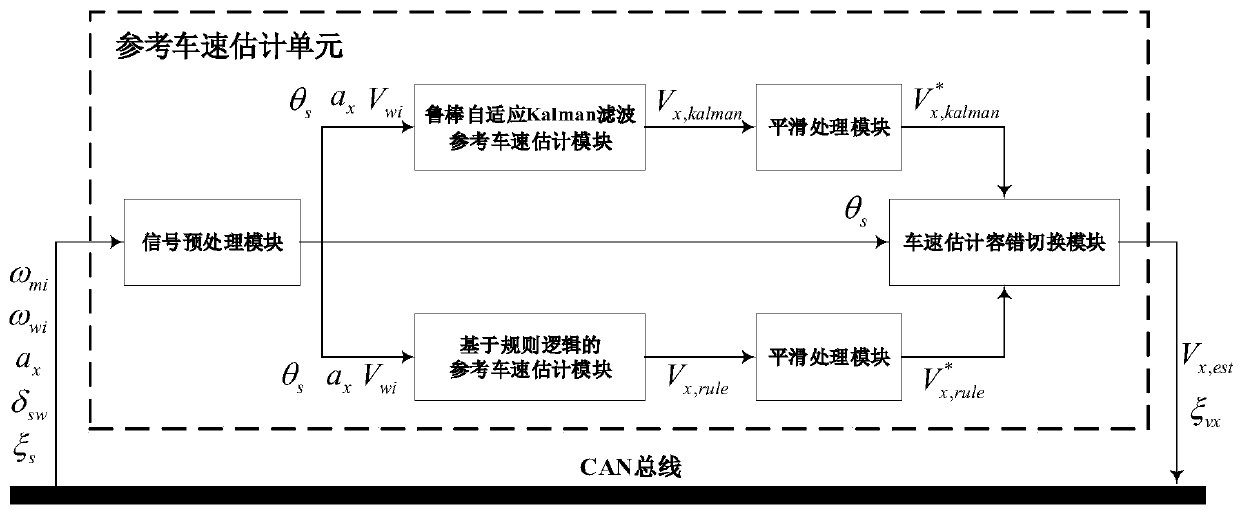
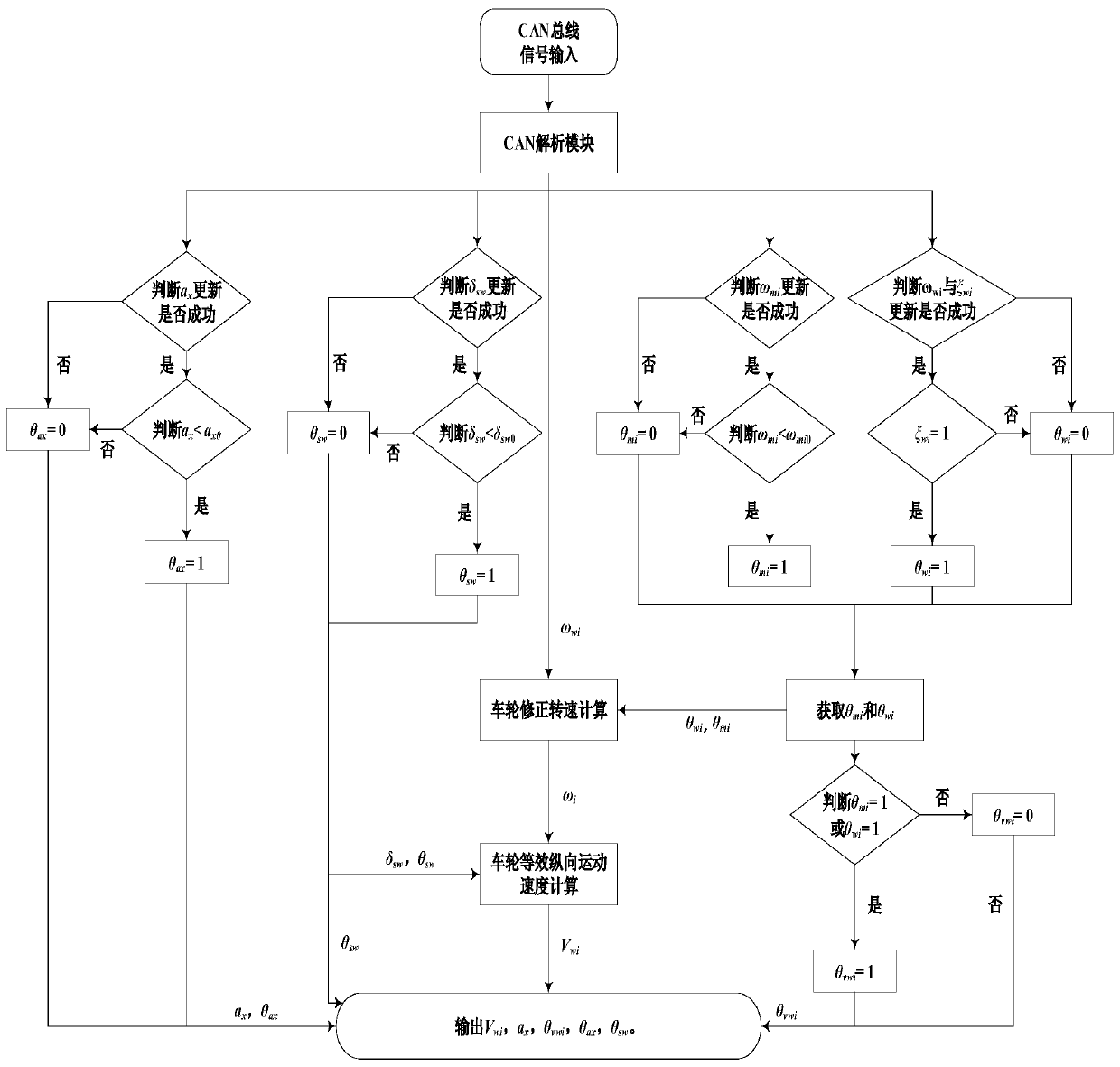
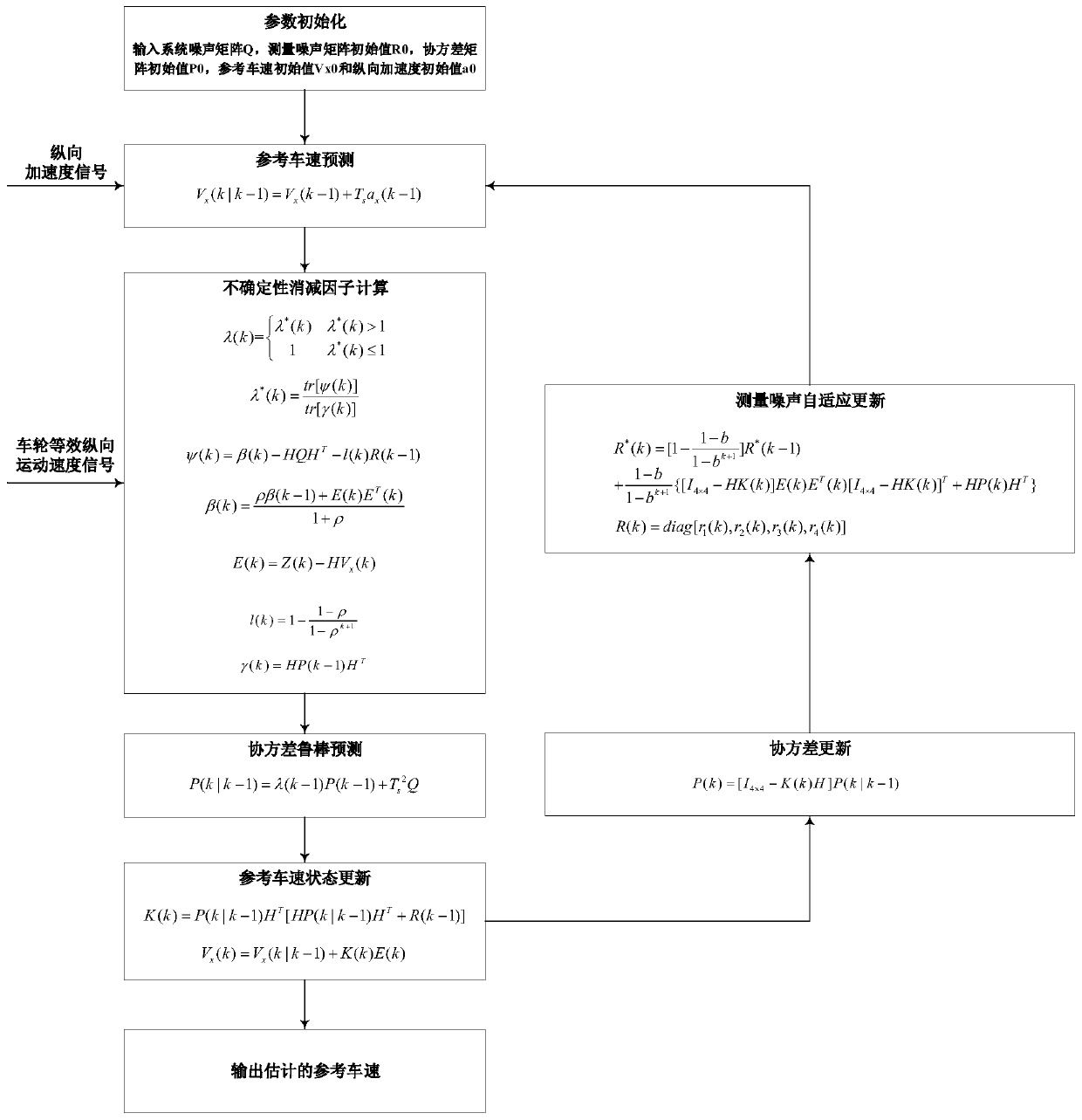
[0091] Such as Figure 1-Figure 5 As shown, the present invention provides a reference vehicle speed fault-tolerant adaptive estimation method for a four-wheel independent drive electric vehicle, which includes the following steps:
[0092] Step 1: Obtain the wheel speed sensor signals ω of the four wheels of the electric vehicle from the CAN bus of the electric vehicle wi , Four electric vehicle motors feedback motor speed signal ω mi , The longitudinal acceleration signal at the center of mass of the entire electric vehicle a x , Electric vehicle steering wheel angle signal δ sw And the signal valid state ξ of the four wheel speeds of the electric vehicle wi , Input t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More