

Mechanical arm feeding system
A feeding system and manipulator technology, applied in the field of manipulator systems for handling and feeding, can solve the problems of separate collaborative execution, high equipment failure rate, affecting processing rhythm, etc., and achieve the effect of high speed, low investment cost and high production efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
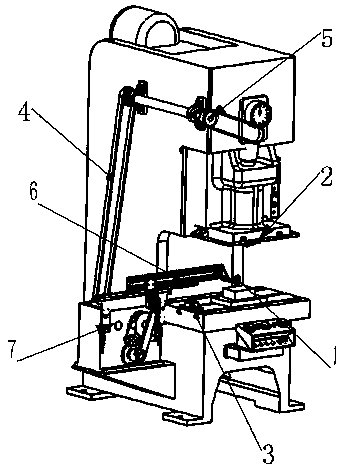
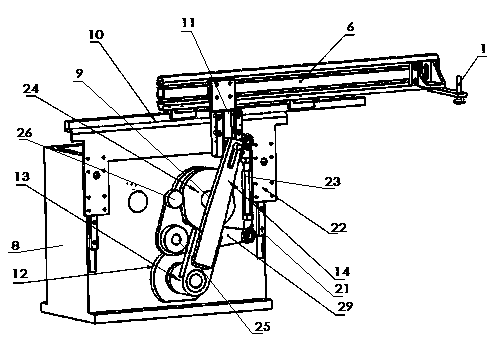
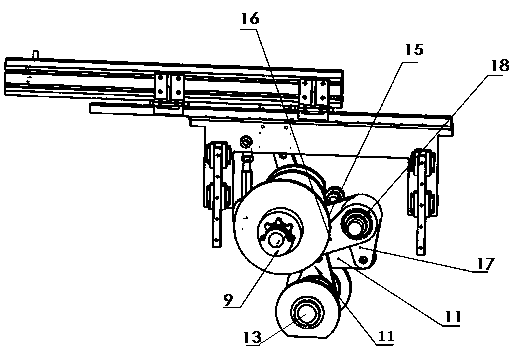
[0030] The figure is an embodiment of the manipulator feeding system of the present invention, including a punching machine, a feeding manipulator 7 arranged on the feeding side of the punching machine, the feeding manipulator is connected to the punch driving device 5 through a chain 4, the feeding manipulator includes a feeding bracket 8, and the feeding manipulator is set The X-axis motion guide rail device on the feeding bracket, the Z-axis motion guide rail device installed on the side of the feeding bracket, the X-axis driving mechanism connected with the X-axis motion guide rail device, and the Z-axis motion guide rail device driving connection The Z-axis drive mechanism, and the main drive shaft 9 that is arranged on the bracket and is connected with the chain through gears and provides the power of the X-axis drive mechanism and the Z-axis drive mechanism; The X-axis guide rail 10 on the top of the bracket is slidably arranged on the X-axis guide rail and the moving me...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More