

Unmanned aerial vehicle flight time optimal real-time trajectory optimization method capable of ensuring convergence
A time-of-flight and trajectory optimization technology, applied in the field of trajectory optimization, can solve problems such as difficulty in meeting real-time requirements, difficulty in explaining the black-box model solution process, and difficulty in path planning methods to generate trajectories with both optimal time and variable speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
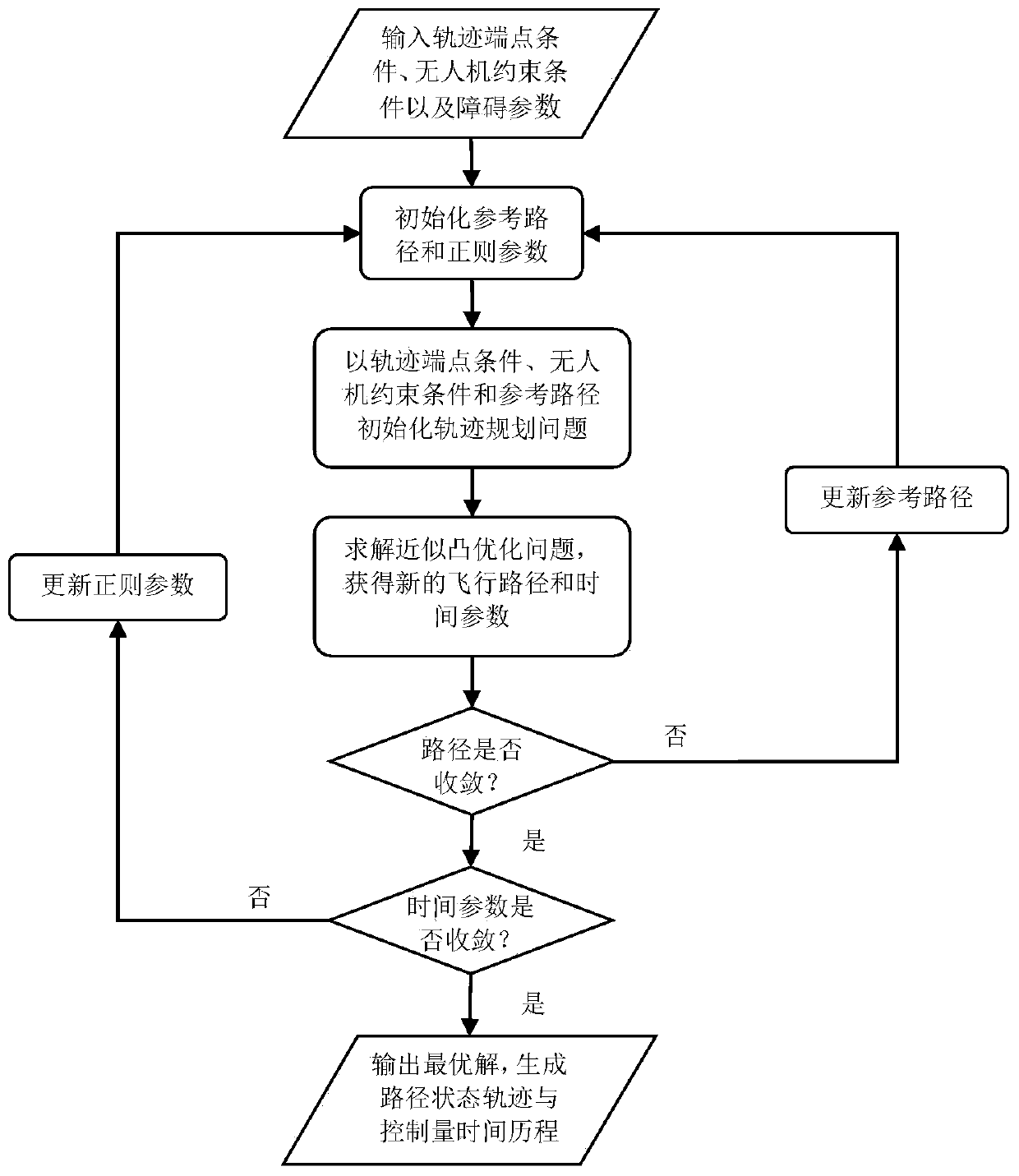
[0167] Such as figure 1 As shown, the optimal real-time trajectory optimization method for the flight time of the unmanned aerial vehicle that ensures convergence is disclosed in this embodiment, and the specific implementation steps are as follows:
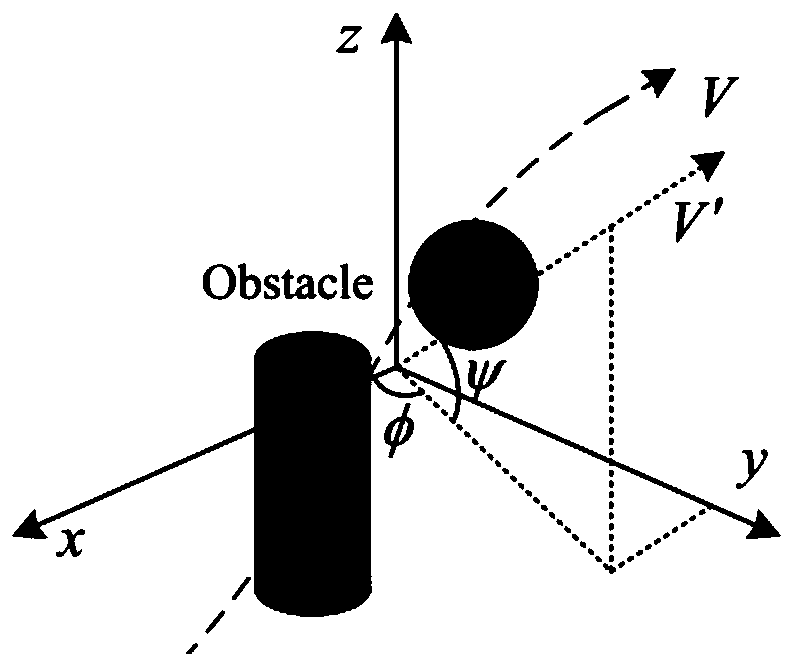
[0168] Step 1: UAV kinematics modeling, the dimensionless motion equation of UAV three-dimensional obstacle avoidance is expressed as:
[0169]
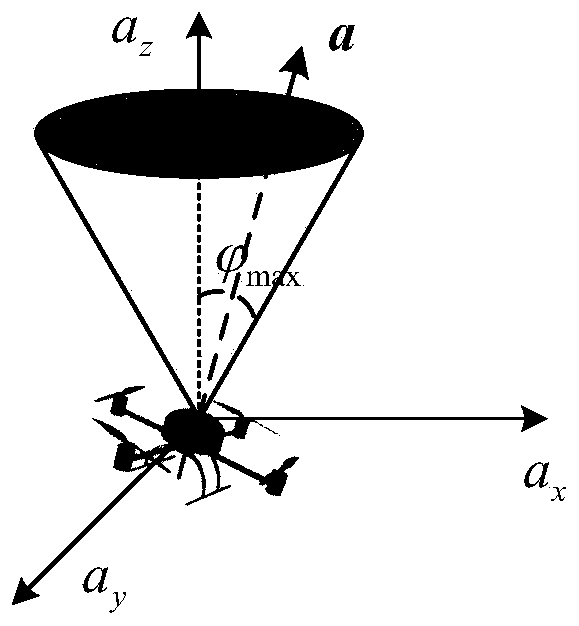
[0170] where r = [x, y, z] T is the spatial position of the UAV, z is the height, x, y are the coordinates in the orthogonal direction of the horizontal plane; V is the speed of the UAV; a=[a x a y a z ] T is the maneuvering overload of the UAV, g=[0 0 g] T is the constant vector of gravitational acceleration. In formula (1), the distance variable [x, y, z] T Using the Euclidean distance L of the initial and end positions 0 To normalize, the speed is used Normalized. for time Normalized.
[0171] Step 2: Establish an optimal control problem model for obstacle avoidanc...
Embodiment A
[0296] Example A: Barrier-free trajectory planning
[0297] This subsection aims to illustrate the computational fastness by the proposed method. Design an obstacle-free situation, the initial and terminal conditions are shown in Table 1. In this case, only one calculation of convex optimization is needed to obtain the solution of the problem. Specifically, it only takes 0.1-0.2 seconds to solve the SOCP problem P3. Because there is no obstacle constraint, path iteration is not required, and only the steps shown in Algorithm 1 are used to solve the problem. In this case, the optimal solution is exactly at the support point corresponding to σ=0, and other state variables will be shown in Figure 6.
[0298] Table 1 Initial and terminal conditions of 3D trajectory planning without obstacle avoidance constraints
[0299]
[0300] The optimal flight time is 19.57s. from Figure 5 It can be seen from -6 that the flight path endpoints and the initial and final angles all mee...
Embodiment B
[0301] Example B: 3D Trajectory Planning Considering Obstacles
[0302] In this instance, consider the task of trajectory planning with obstacle avoidance constraints. As a comparison, two elliptical cylinder obstacles are added to the path of the barrier-free task, and the parameters of the obstacle elliptical cylinders are shown in Table II. The minimum flight time is 20.437 seconds. Figure 7-10 The numerical solution plotted in shows that for this obstacle avoidance path task, the initial, terminal, and acceleration constraints are all satisfied. Figure 7 The path of each iteration process is drawn in , where the initial path is a straight line segment connecting the initial and final points, and the optimal obstacle avoidance path is a thick solid line.
[0303] Table 2 Obstacle Constrained Elliptic Cylinder Parameters
[0304]
[0305] Table 3 shows the convergence error of 8 iterations, where the error about the time parameter and Figure 11 Explanation: The rel...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More