

Hardware implementation method for ORB feature point extraction with good real-time performance
A feature point extraction and hardware implementation technology, applied in the field of computer vision, can solve the problems of huge computing resources, unsuitable intelligent robots, high system power consumption, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] Below in conjunction with accompanying drawing, implementation process of the present invention is described in further detail:
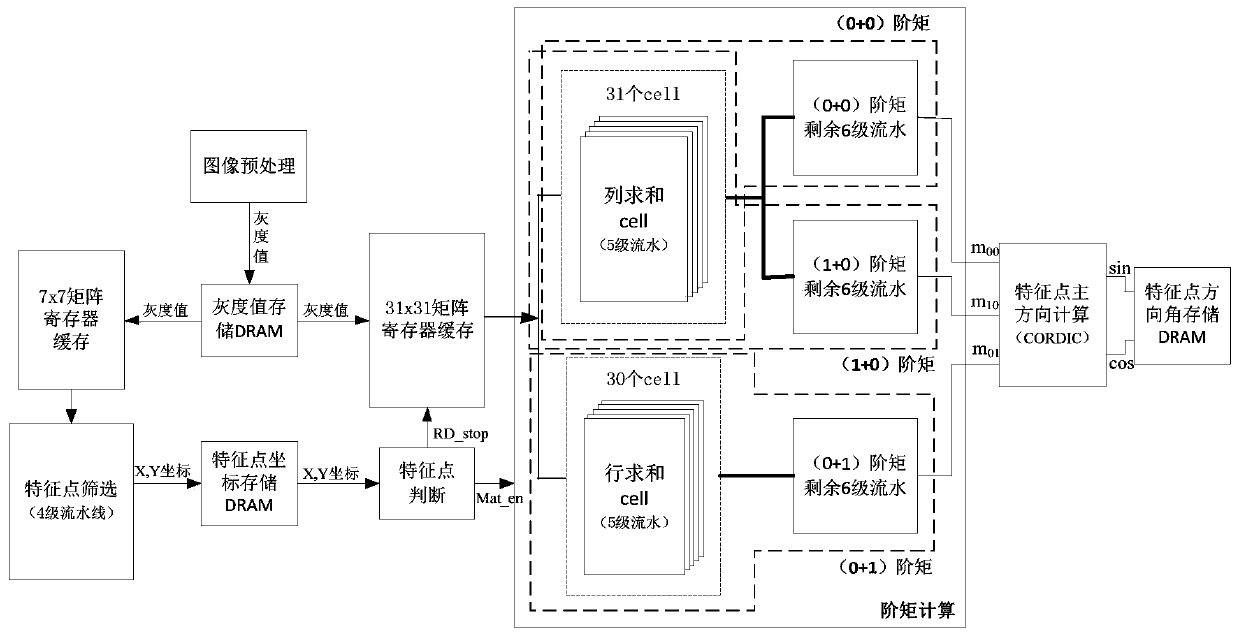
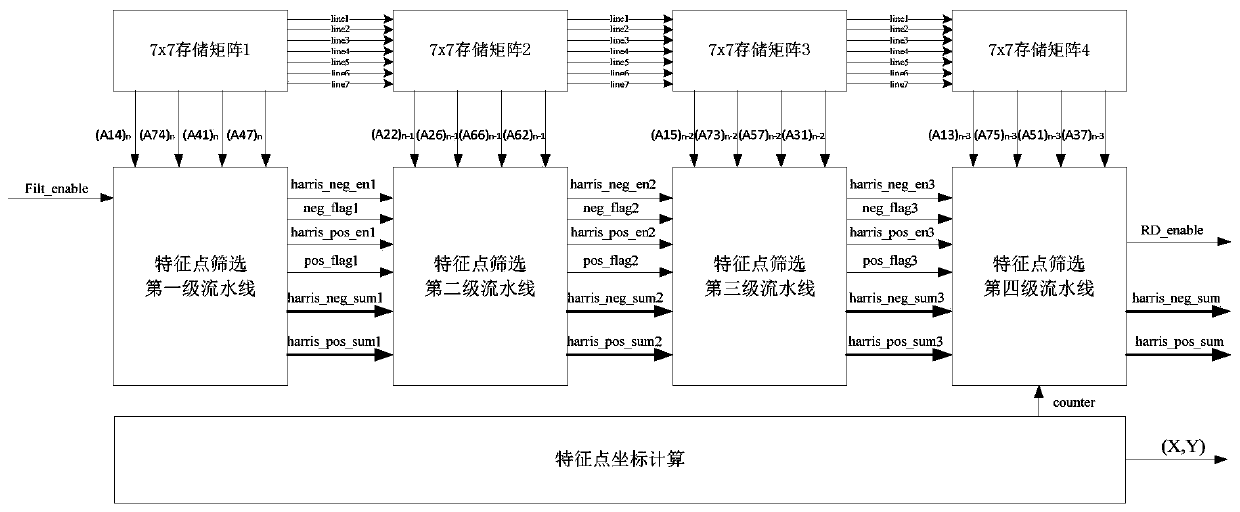
[0044] The present invention designs a four-stage assembly line structure to realize screening of feature points. According to the symmetry of the position of the sampling point on the discretized Bresenham diagram of the central pixel point, the pixel point is divided into four parts according to the vertical direction and the horizontal direction, and each time a pixel point is selected in each group of data, and the position of the pixel point into a symmetrical relationship. After the sampling points are divided into four groups, the gray value comparison with the central pixel point is carried out respectively. Each stage of the four-stage pipeline compares a set of data, and two judgment mechanisms are designed for each stage of the pipeline to screen feature points.
[0045] The present invention carries out pipeline architecture des...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More