Active variable stiffness pectoral fin based on nylon artificial muscles and bionic underwater robot
A technology of artificial muscles and variable stiffness, which is applied to underwater operation equipment, manipulators, manufacturing tools, etc., can solve the problems of difficulty in adapting to complex underwater environments, single movement mode of pectoral fins, and heavy weight of bionic pectoral fins. Response frequency, reduced complexity and weight effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
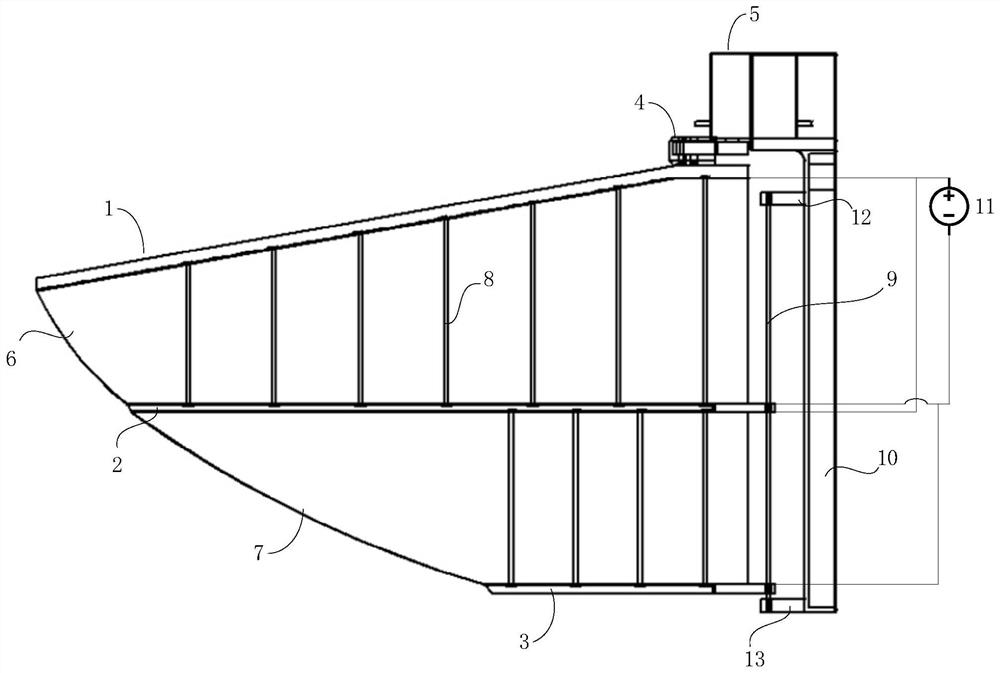
[0049] The fin surface of the flexible pectoral fin is made of M4601 silica gel with a Shore hardness of 28A through mold casting. The flexible fin surface is divided into an upper part and a lower part. The upper flexible fin surface is bonded to the leading edge fin ray and the middle fin ray by WACKER E41 glue, and the lower flexible fin surface is bonded to the middle fin ray and the tail fin ray. The fin surface thickness is 2mm.
[0050] Three flexible fins are made of PA12 nylon material through 3D printing; the leading edge fins form an angle of 15 degrees with the horizontal line, and their length is 300mm. The middle fin ray is horizontal and the length is 250mm. The length of the tail fin ray is 80mm. The thickness of all fins gradually transitions from 5mm at the root to 2mm at the tip. Since the thickness gradient on the fin ray is thicker on the inside and thinner on the outside, the overall rigidity of the pectoral fins along the span direction is relatively...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Diameter | aaaaa | aaaaa |
| Length | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com