STM32-based control circuit of cabled underwater robot and control method of STM32-based control circuit
An underwater robot and control circuit technology, which is applied in the field of robots to eliminate false alarms, save costs, and improve diving durability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
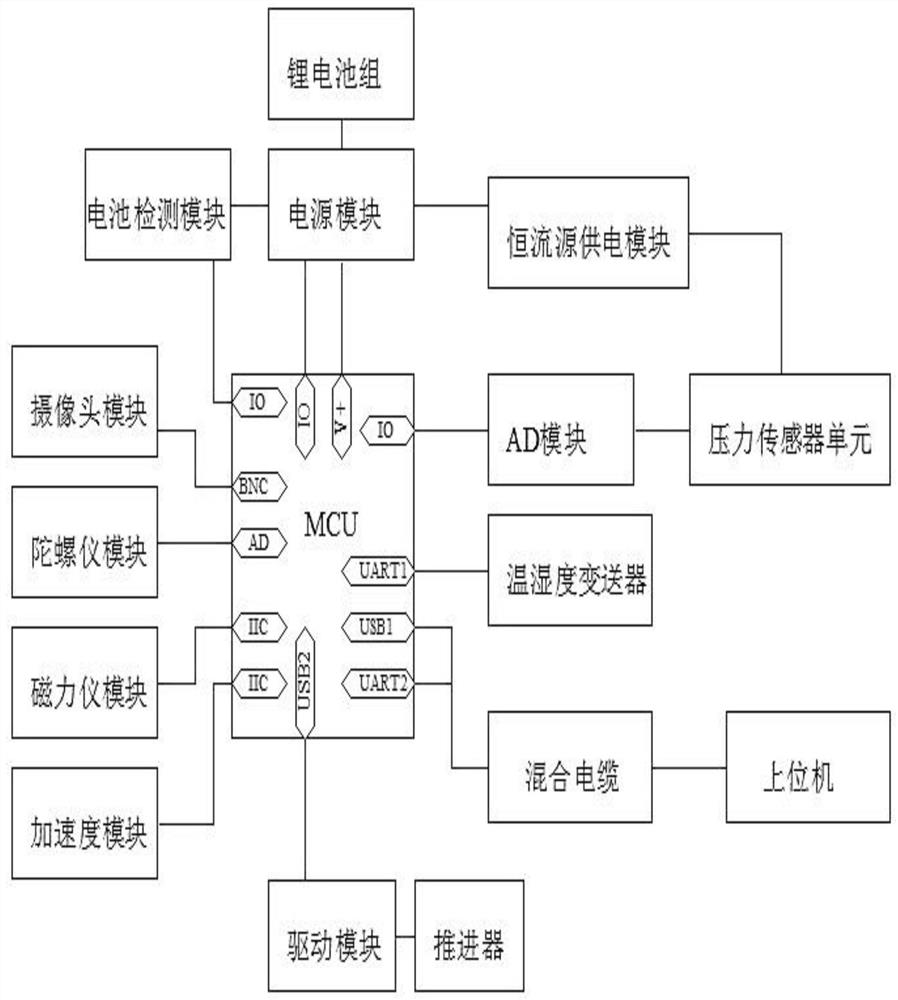
[0040] Such as Figure 1-Figure 3 The control circuit of a cabled underwater robot based on STM32 is shown, including MCU module, camera module, gyroscope module, magnetometer module, acceleration module, drive module, battery detection module, power module, lithium battery pack BAT1, Constant current source power supply module, AD module, pressure sensor unit, temperature and humidity transmitter and hybrid cable, the camera module is connected to the MCU module through the BNC interface, the gyroscope module is connected to the AD interface of the MCU, and the magnetometer module is connected to the IIC of the MCU module Interface connection, the acceleration module is connected to the IIC module of the MCU module, the drive module is connected to the MCU module through the USB interface, the drive module is used to drive the external thruster, the temperature and humidity transmitter is connected to the MCU module through the serial port, and the output port of the pressure ...
Embodiment 2
[0067] The control method of a cabled underwater robot based on STM32 described in Embodiment 2 is realized on the basis of the control circuit of a cabled underwater robot based on STM32 described in Embodiment 1, including the following steps:
[0068] Step 1: Establish the control circuit of the cabled underwater robot based on STM32; the MCU module communicates with the host computer through a hybrid cable;
[0069] Step 2: The MCU module reads the video data, attitude data, magnetic force data and speed data of the underwater robot collected by the camera module, gyroscope module, magnetometer module and acceleration module, and uploads them to the host computer through the hybrid cable;
[0070] Step 3: The MCU module controls the external propeller through the drive module, thereby controlling the movement of the underwater robot;
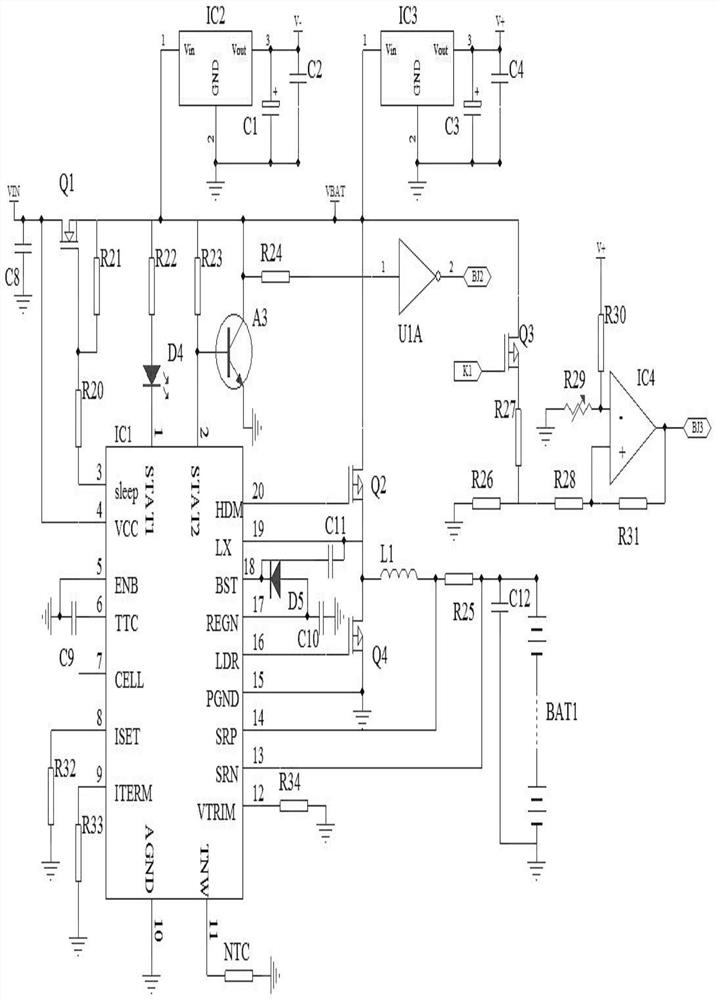
[0071] Step 4: The battery alarm circuit detects pin 2 of the lithium battery management chip IC1, and monitors the temperature of the lith...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com