

Automatic positioning control system and method for steelmaking scrap steel platform car
An automatic positioning and control system technology, applied in general control systems, control/regulation systems, program control in sequence/logic controllers, etc. With conditions and other issues, to achieve the effect of reducing control costs, reducing labor intensity, and low input costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
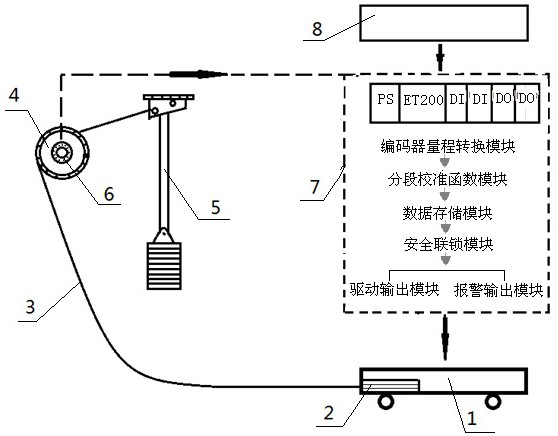
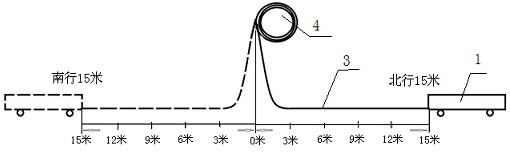
[0058] This embodiment is an automatic positioning control system for steel scrap platform trucks, with a stroke of 30 meters. The platform truck 1 runs north-south, stops at 15 meters when traveling south, and stops at 15 meters when traveling north.
[0059] Transmission motor 2: YZR225M-8
[0060] Tolan 5: JYFFG 3*16
[0061] Reel 4 (hammer type cable reel): ZCJ-40-II
[0062] Scrap car: 60T
[0063] Encoder 6: OMRON (E6C3-AG5B 256P / R 1M), resolution: 256P / R (8 bits), output mode: PNP open collector output, output code: Gray code.
[0064] PLC hardware: IM153-1(6ES7 153-1AA03-0XB0), DI32(6ES7 321-1BL00-0AA0), DO32(6ES7 322-1BL00-0AA0), PS307 5A(6ES7 307-1EA00-0AA0).
[0065] Operation box 8: automatic manual transfer switch, fault reset, automatic southbound button, automatic northbound button, automatic stop button, manual jog southbound button, manual jog northbound button, automatic indicator light, manual indicator light, southbound Indicator light, northbound indic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More