

Nuclear operation and maintenance robot shaft hole assembling method based on man-machine cooperation
An assembly method and robot technology, applied in the direction of manipulator, metal processing, metal processing equipment, etc., can solve the problems of heavy manual operation tasks, accidental shaft holes, complex working environment, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
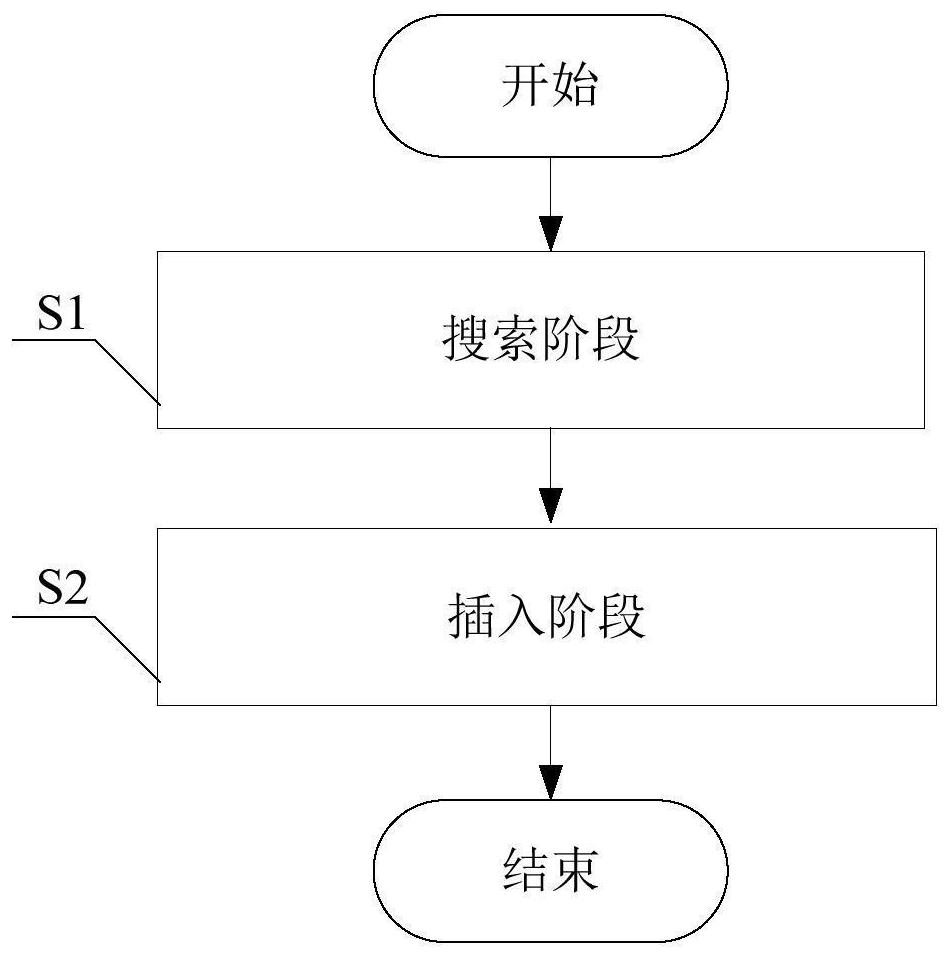
[0064] In order to reduce the radiation dose of the operation and maintenance personnel and improve the efficiency of operation and maintenance, this paper proposes a method for assembling the shaft hole of the nuclear operation and maintenance robot based on human-machine cooperation, and introduces the robot autonomous control technology in the installation process of the nuclear detector outside the reactor. All operations must be carried out under the premise of human monitoring, that is, "teleoperation + partial autonomy". Fully combine robot intelligence with human intelligence: use human experience and knowledge to complete the hole-seeking task of shaft-hole assembly, enhance the reliability of the operation process, and ensure that risks are controllable; at the same time, use the DRL algorithm to enable the robot to complete pins autonomously in local areas Insertion tasks such as figure 1 As shown, the implementation method is as follows:
[0065] S1. Search stage:...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More