

Anti-collision control method and system for stacker-reclaimer
A control system and anti-collision technology, which is applied to conveyor control devices, conveyors, conveyor objects, etc., can solve the problems of limiting the working range of stackers and reclaimers, complex algorithms, and large amount of calculation, so as to achieve comprehensive prevention without dead ends. The effect of collision, reducing blind spot of sight, and automatic collision avoidance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
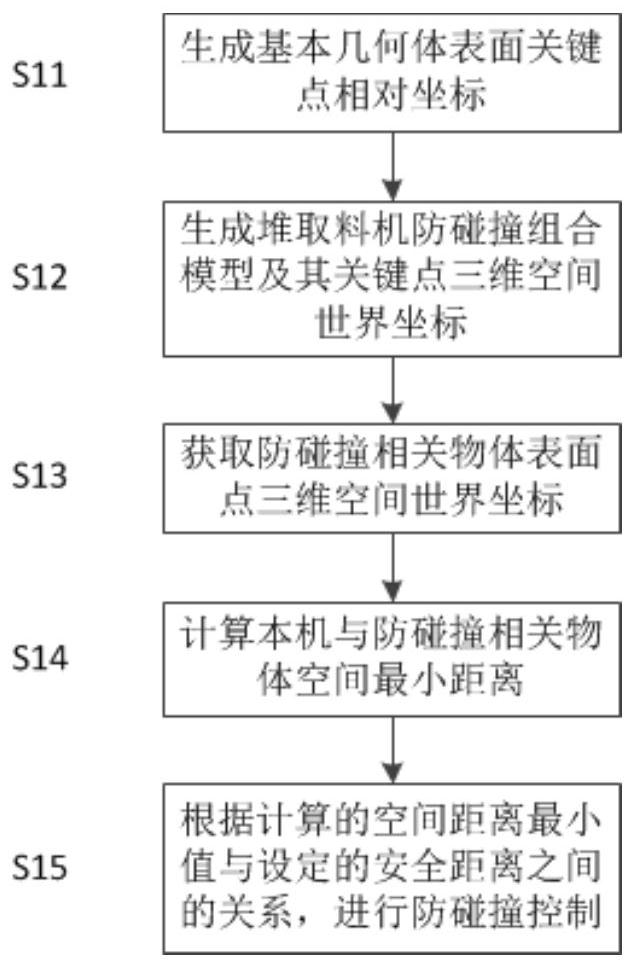
[0043] Such as figure 1 A stacker-reclaimer anti-collision control method shown in Embodiment 1 specifically includes the following steps:
[0044] Step S11: Generate the relative coordinates of key points on the surface of the basic geometry, that is, extract the basic geometry that can envelop the mechanical structure according to the mechanical size of the stacker-reclaimer, generate key points on the surface of the basic geometry, and obtain the relative coordinates p1 of the key points.
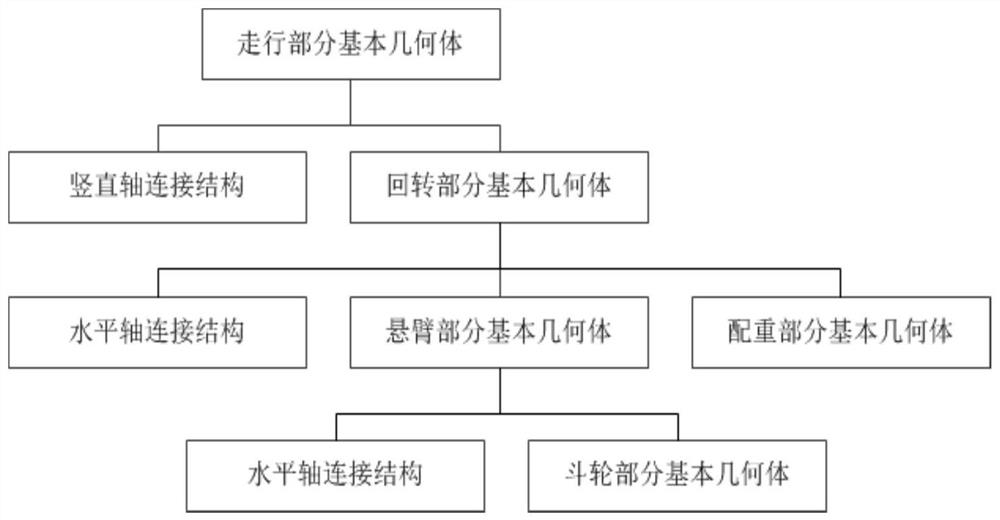
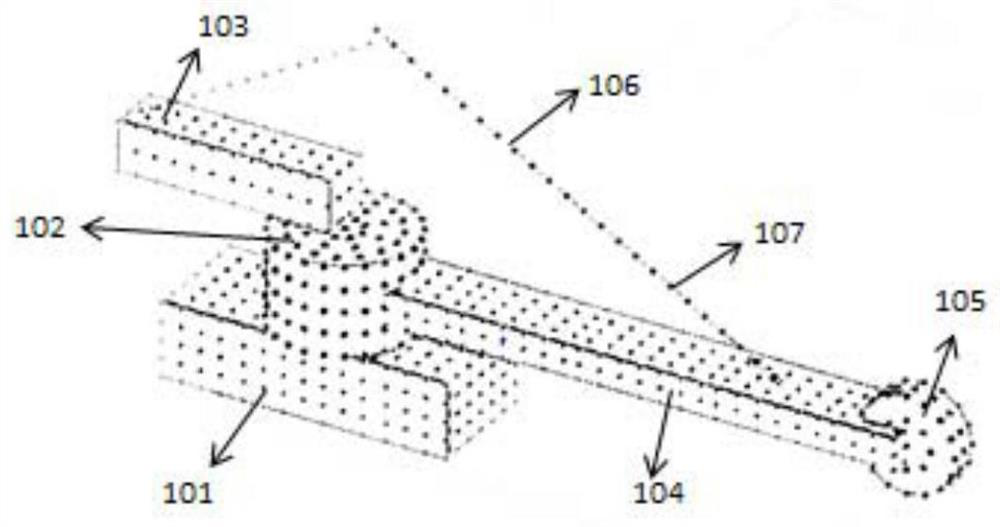
[0045] In this step, based on the mechanical structure of the stacker-reclaimer, the basic geometry that can envelop the mechanical structure is extracted. image 3 In the preferred solution, the embodiment of the present invention simplifies the running part of the reclaimer into a cuboid, the rotating part into a cylinder, the counterweight part into a cuboid, the cantilever part into a cuboid, the bucket wheel part into a cylinder, and the tie rod part into a for the line segment.
...
Embodiment 2
[0080] Figure 4 It shows the functional block diagram of the stacker-reclaimer anti-collision system in one embodiment. The present invention also discloses a stacker-reclaimer anti-collision control system. The system includes stacker-reclaimer attitude acquisition equipment and anti-collision related object surface point acquisition equipment. . A stacker-reclaimer PLC control system and an anti-collision computing server, wherein the system executes any one of the methods described above.
[0081] The stacker-reclaimer attitude acquisition equipment (Compass / GPS system, Gray bus, encoder, inclinometer, etc.) is used for real-time collection of the stacker-reclaimer walking, turning, and pitching attitude data;
[0082] The anti-collision-related object surface point acquisition equipment includes acquisition equipment for world coordinates in three-dimensional space, and the anti-collision related objects include stockpiles, fixed structures, ground, and dam foundations; ...
Embodiment 3
[0092] Figure 6 is a schematic structural view of the stacker-reclaimer anti-collision control system in Embodiment 3. In this embodiment, the first stacker-reclaimer and the second stacker-reclaimer, stockpile, fixed structures, ground, Anti-collision calculations for various working conditions such as dam foundations, where the first stacker-reclaimer and the second stacker-reclaimer can be two stacker-reclaimers on the same track, or two stacker-reclaimers on adjacent tracks feeder. The anti-collision monitoring client 2, the anti-collision calculation server 3, and the Ethernet switch 4 are set in the central control room 1, wherein the anti-collision calculation server 3 is equipped with stacker-reclaimer anti-collision calculation software, which includes a data communication module, a space distance The calculation module, the anti-collision strategy generation module and three parts, wherein the data communication module is used for the anti-collision calculation serve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More