

Greenhouse environment temperature self-adaption method based on parameter identification
A technology for ambient temperature and parameter identification, applied in adaptive control, instruments, control/regulation systems, etc., can solve problems such as fast response speed, small overshoot, and short transition time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
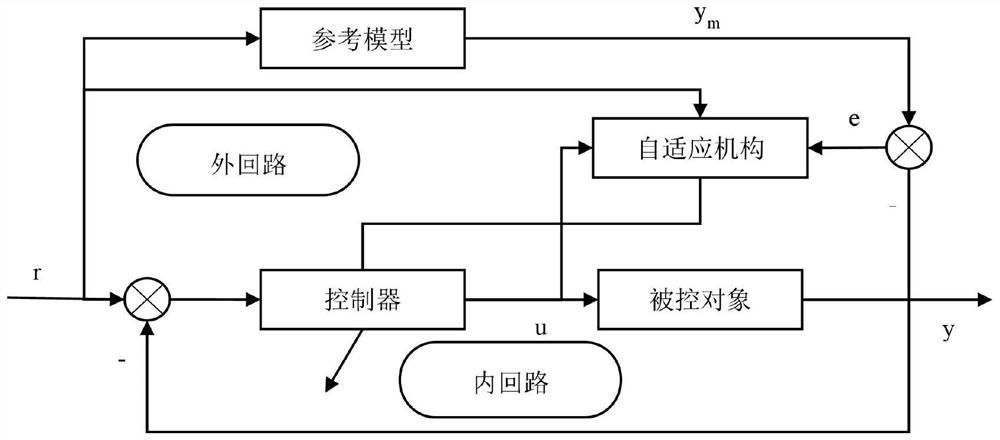
[0080] refer to figure 1 , model reference adaptive control is a form of adaptive control. The design of the reference model can be based on the structure and control requirements of the controlled object. Make its output express the expected response to the input command, and then adjust the controller parameters through the difference between the model output and the output of the controlled object to make the difference tend to zero, that is, to make the object output approach the model output, and finally achieve complete consistency. The model reference adaptive control system in the step S2 is composed of a reference model, a controlled object, a feedback controller and an adaptive mechanism; the feedback loop formed by the controlled object and the feedback controller constitutes an inner loop, and the feedback control The controller and the adaptive mechanism form an outer loop for adjusting the parameters of the feedback controller, and the output of the reference mo...
Embodiment 2
[0083] The design of the adaptive adjustment law in this application uses the gradient method. The gradient method is one of the parameter optimization methods. Its design principle is to construct an objective function consisting of a generalized error and an adjustable function, and can be regarded as a hypersurface in the adjustable parameter space. A parameter optimization method is used to gradually reduce the objective function. The consistency requirement between the tunable system and the reference model is satisfied until the objective function reaches a minimum or near a minimum.
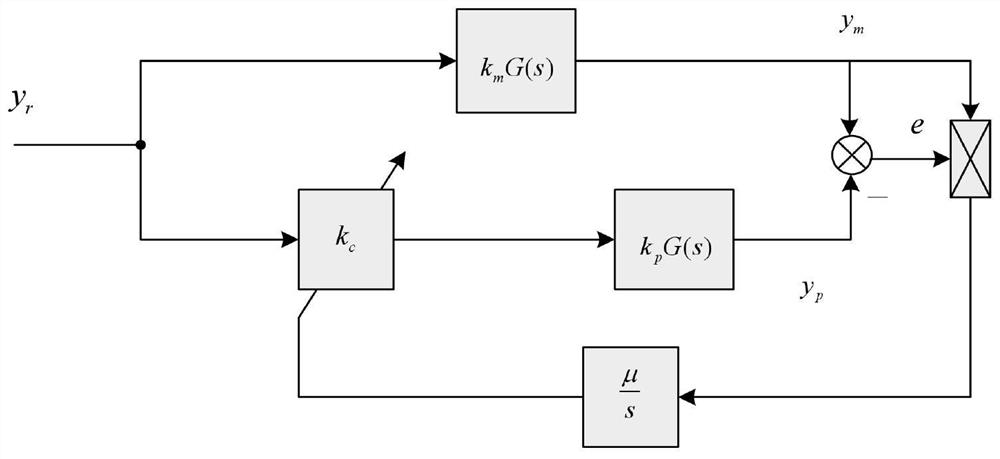
[0084] The reference model takes K m G(s), where K m In order to make the model output reach the gain of the desired state; when the system is disturbed, the gain K of the controlled object p changes, and its dynamic characteristics deviate from those of the reference model; due to K p The change is not measurable, in order to overcome by K p The effect caused by the drift, set the ad...
Embodiment 3
[0113] The method for verifying stability in the step S2 is:
[0114] The transfer function of the first-order system is The mathematical model of the closed-loop adaptive control system designed according to the MIT rules should be:
[0115]
[0116]
[0117]
[0118] Suppose t = t 0 when y and y m are all zero, and k c k p ≠k m , give the system a step signal with an output amplitude of R, then t 0 The output of the reference model is then:
[0119] the y m =k m R(1-e -t / T ) (1-17)
[0120] So the adaptive regulation law is:
[0121]
[0122] Taking the derivative of the open-loop generalized error equation gives:
[0123]
[0124] Substituting formula (a) into formula (b) gives:
[0125]
[0126] When t→∞, the coefficient of the third term e of Equation 1-20 tends to k p kk m R 2 , that is:
[0127]
[0128] According to Routh's criterion, it can be seen that this system of equations is asymptotically stable, that is, when t→∞, there a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More