

Human-robot cooperative control method based on human body dynamic arm strength estimation model
An estimation model and collaborative control technology, applied in the field of human-computer interaction, can solve the problems of ignoring the nonlinear relationship between joint angles and electromyographic signals, the gap between the prediction accuracy of dynamic joint force estimation accuracy, and the low dynamic muscle force estimation accuracy. The effect of high estimation accuracy, improved real-time performance, and reduced labor intensity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
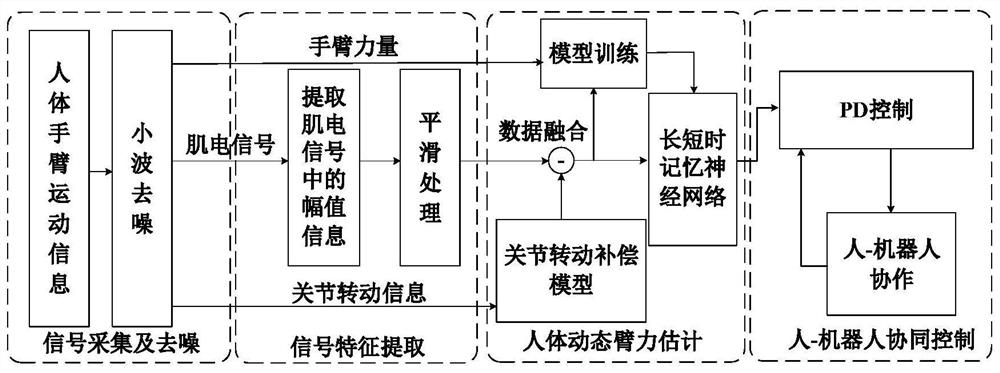
[0045] In this embodiment, a human-robot collaborative control method based on the human body dynamic arm force estimation model, such as figure 1 shown, including the following steps:
[0046] 1) Signal acquisition and denoising stage
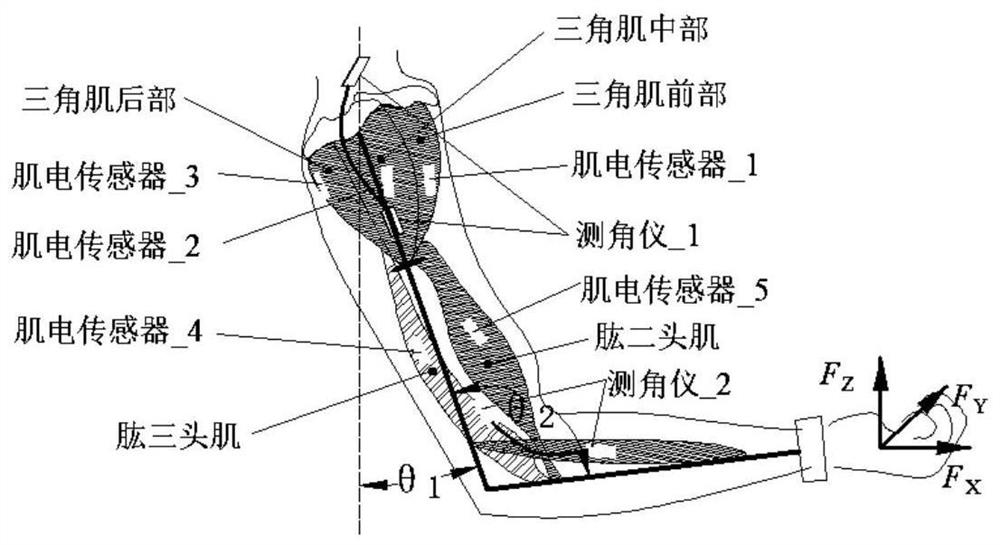
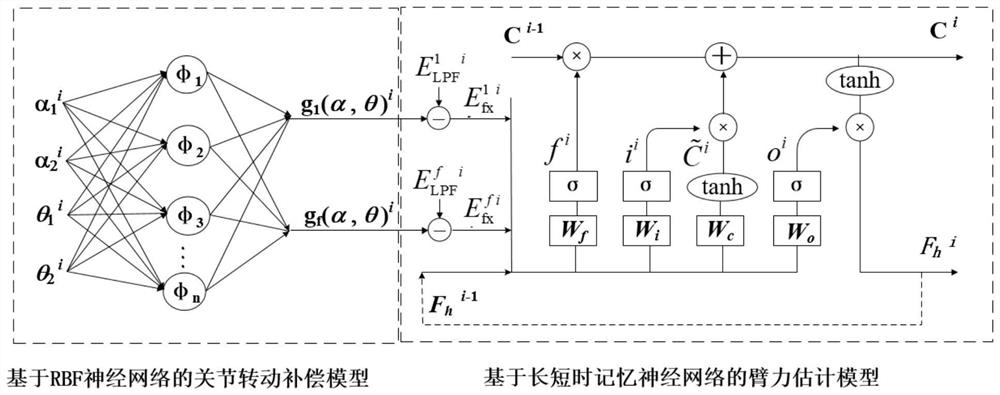
[0047] Such as figure 2 As shown, the surface electromyographic signals of the front, middle and rear of the deltoid muscle, biceps brachii and triceps brachii are separated by the electromyography sensor, and the shoulder joint rotation angle θ is determined by the goniometer. 1 and elbow joint angle θ 2 , using a force sensor to collect arm strength information, and using the collected data as training data for a human dynamic arm strength estimation model, the human dynamic arm strength estimation model includes a joint rotation compensation model, a long-short-term memory neural network, and this model is a follow-up human-robot The coordinated control of the arm provides arm strength information. The wavelet filtering algorithm is us...
Embodiment 2
[0118] This embodiment is a human-robot collaborative control method based on the human body dynamic arm strength estimation model. Compared with Embodiment 1, the difference is that the human body dynamic arm strength estimation model includes a joint rotation compensation model, data fusion and BP neural network. In the human body dynamic arm strength estimation stage, adopt BP neural network to estimate human arm strength; Described BP neural network structure is:
[0119]
[0120] is the input value of the fth input node of the BP neural network, y f is the value of hidden nodes, m is the number of hidden layer nodes, n is the number of input layer nodes, F h is the value of the output node (estimated arm strength), ω fi is the connection weight between an input node and a hidden node, ω kf is the connection weight between a hidden node and an output node, b in Input layer node threshold, and b hi Hidden layer node threshold.
Embodiment 3
[0122] This embodiment is a human-robot collaborative control method based on the human body dynamic arm strength estimation model. Compared with Embodiment 1, the difference is that the sliding window length N and the forgetting parameter η of the above-mentioned improved root mean square filter are carried out. Bayesian optimization, select the optimal parameters to preserve the delay and preserve the feature information to the greatest extent.
[0123] Using the joint rotation angle θ under no load and the extracted feature signal E LPF The correlation degree |ρ| is used as the evaluation standard for filter parameter selection. The closer |ρ| is to 1, the extracted feature signal E LPF The higher the correlation with the joint rotation angle θ, it indicates that the feature signal contains more useful information at this time, and the filtering delay is small.
[0124]
[0125] Cov(θ,E LPF ) is the feature extraction signal E LPF The covariance with the joint rotati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More