

Elevated cargo automatic grabbing and placing loading and unloading robot
An overhead, robotic technology, applied in loading/unloading, packaging, stacking of objects, etc., can solve the problems of manual handling safety hazards, increased grasping, difficulty, etc., to reduce personnel consumption and labor costs, and improve the application. Scope and flexibility, productivity-enhancing effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
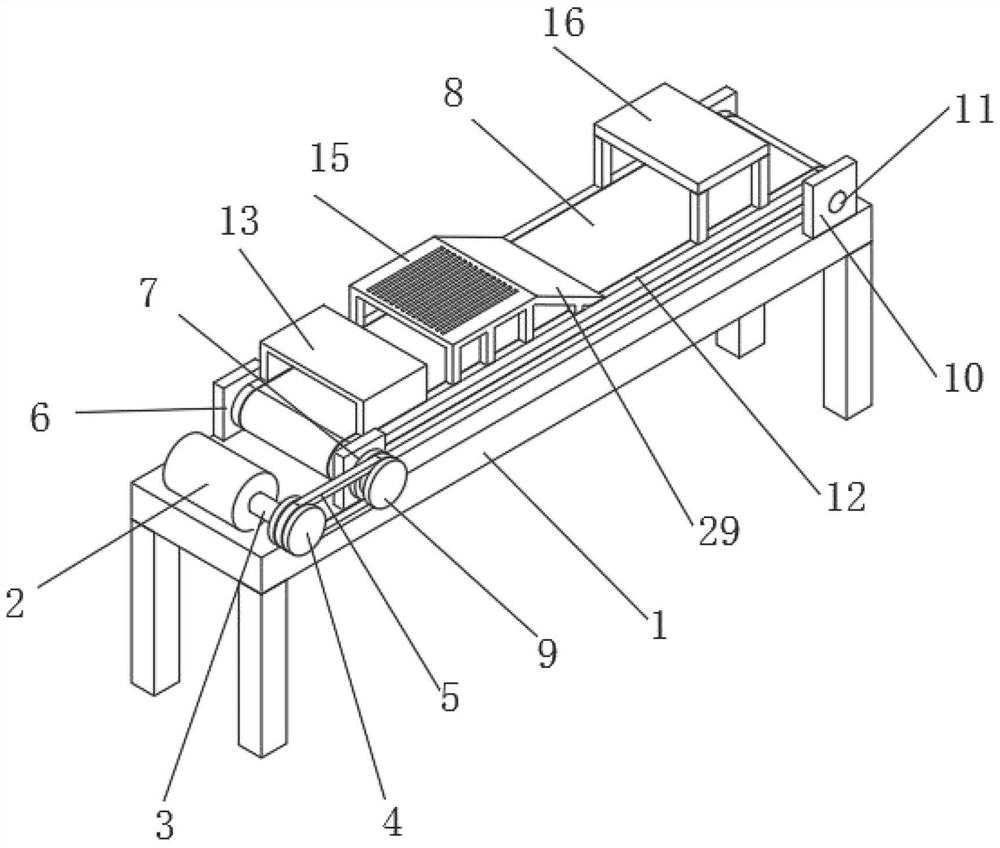
[0022] Example: see Figure 1-4 , the present invention provides a technical solution: an elevated cargo automatic grab and place loading and unloading robot, comprising a bracket 1, a motor 2 is arranged on the left side of the top of the bracket 1, and a rotating shaft 3 is fixedly connected to the front of the motor 2, and the rotation The outer ring of the shaft 3 is covered with a first sprocket 4, the outer ring of the first sprocket 4 is covered with a belt 5, and the side opposite to the left side of the top of the bracket 1 is provided with a side plate 6, and a connecting shaft is fixedly connected between the side plates 6 7. The outer ring of the connecting shaft 7 is covered with a conveyor belt 8, the front of the outer ring of the connecting shaft 7 is covered with a second sprocket 9, and the opposite side on the right side of the top of the bracket 1 is provided with a riser 10, and the stand of the riser 10 is fixedly connected There is a horizontal axis 11, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More