

Dynamic modeling and track following control method and device for flexible robot
A dynamic modeling and control device technology, which is applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve the complex problems of robot dynamic control and trajectory planning, achieve optimal driving rope tension, save energy, and improve trajectory following The effect of precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
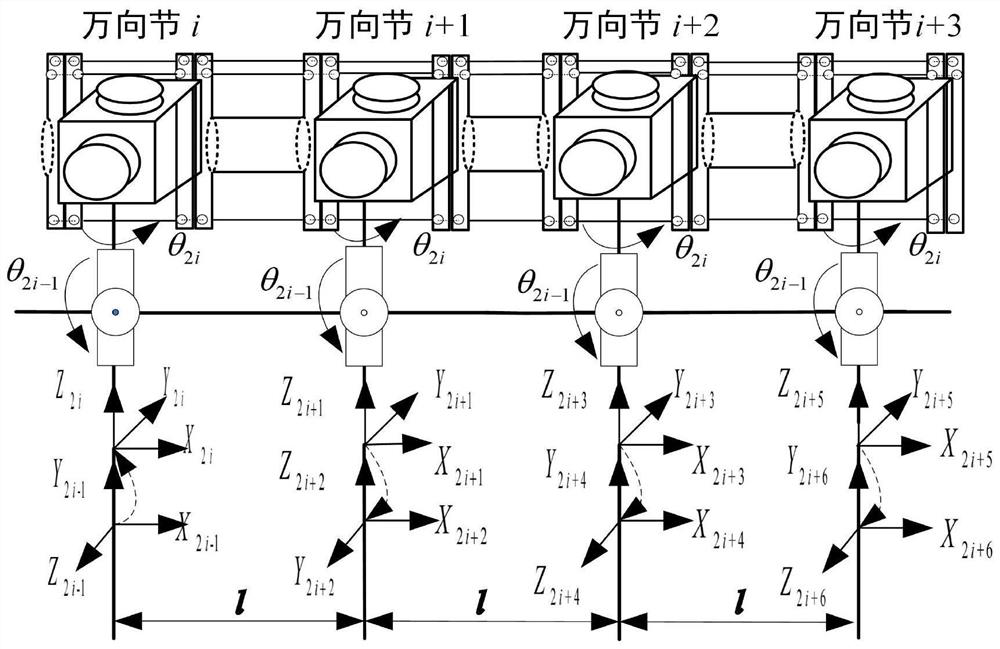
[0049] This example provides a soft robot, such as figure 1 . The flexible robot is based on a discrete rigid link and a segmented linkage configuration, and its main parts include an arm rod, a central block, a linkage rope, and a driving rope. The arms are connected by universal joints, and several connected arms form an arm segment, and the degree of freedom in the same direction is coupled together through the connection of linkage ropes in each arm segment, so that the joints between adjacent joints in the arm segment The included angles are strictly equal, and each arm segment is controlled with two degrees of freedom by three cables.
[0050] In this embodiment, by introducing a flexible robot, the existing 6-DOF robot has limited motion space, poor motion flexibility, and is not suitable for an unstructured environment. This type of flexible robot has the advantages of large movement space, strong flexibility, and good environmental adaptability, and adopts a discret...
Embodiment 2
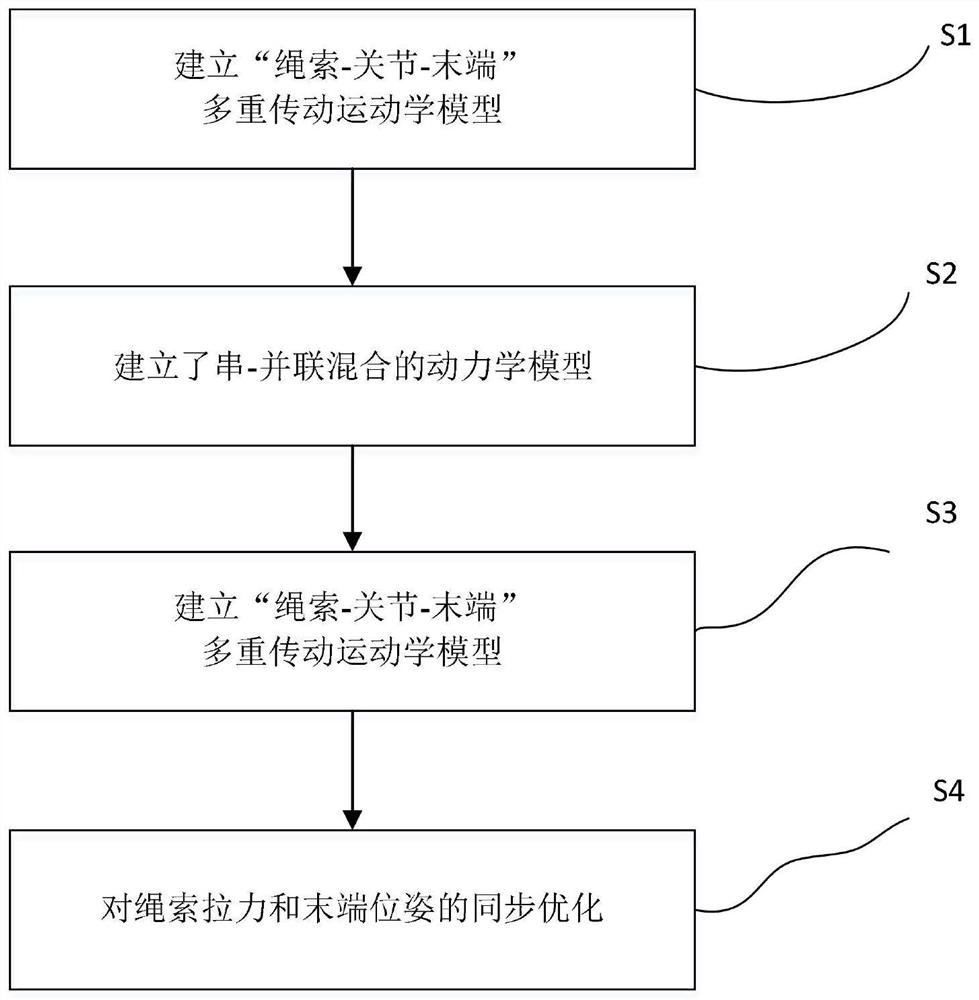
[0052] Embodiment 2 of the present invention provides a dynamic modeling and trajectory following control method for a flexible robot. This embodiment is suitable for a flexible robot with a discrete rigid link and segmented linkage configuration. Follow the given trajectory. figure 2 It is an implementation flowchart of a flexible robot dynamics modeling and trajectory following control method provided by the embodiment of the present invention. As shown in the figure, the method may include the following steps:
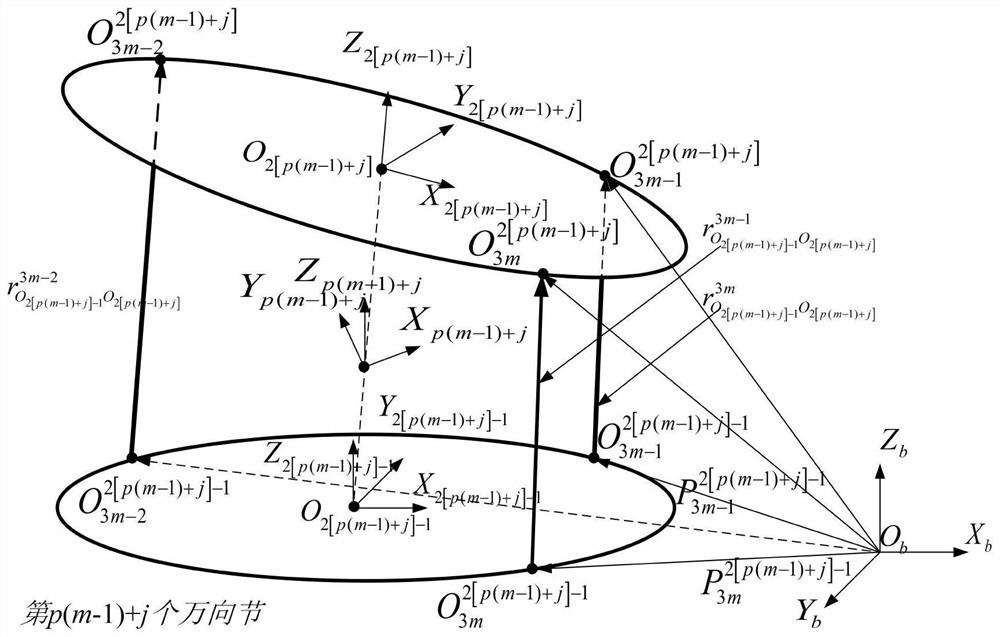
[0053] S1 establishes the "rope-joint-end" multiple transmission kinematics model: establishes a D-H coordinate system for each joint of the target robot, and obtains the D-H parameter table according to the actual geometric parameters between each joint and the joints, and then derives the pose and velocity of the robot end , acceleration, joint angle, angular velocity, and angular acceleration, and establish a mapping relationship from joint space to terminal Car...
Embodiment 3
[0184] Embodiment 3 of the present invention provides a dynamic modeling and trajectory following control device for a flexible robot, which is used to implement the method described in Embodiment 2, such as Figure 7 As shown, it is the flexible robot dynamics modeling and trajectory following control device of this embodiment, classified according to the action type, can be divided into the following modules:
[0185] Deviation data acquisition module: used to obtain relative deviation data and construct the space model of the flexible robot, the relative deviation data includes: the relative position displacement and the deviation of the position and posture of the end point of the flexible robot and the set expected point, the actual The deviation of the rope length from the expected rope length and the deviation of the actual tension of the rope from the expected tension.
[0186] Calculation module: Cartesian space spline interpolation, kinematics, dynamics, and nonlinea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More