

Light force fusion tail end clamping device and positioning control method thereof
A gripper and positioning technology, which is applied in the field of optical force fusion end gripper and its positioning control, can solve the problems of inaccurate adjustment of the robot's pose, difficulty in hitting the target, and affecting positioning, etc., to achieve convenient clamping and disassembly operations Fast, reduce accidental errors, and speed up recovery
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The present invention will be further described below in conjunction with specific implementation examples, but the embodiments of the present invention are not limited thereto.
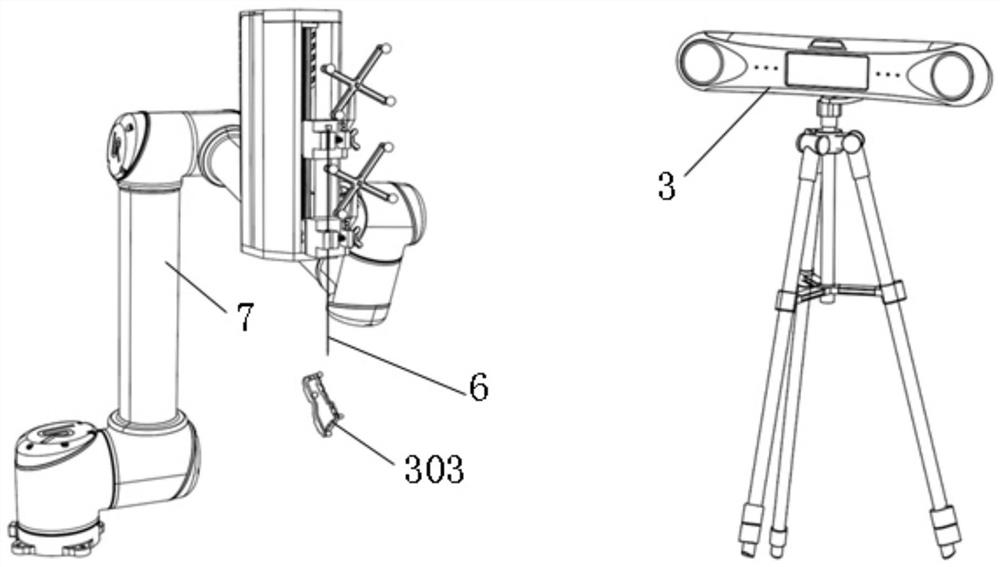
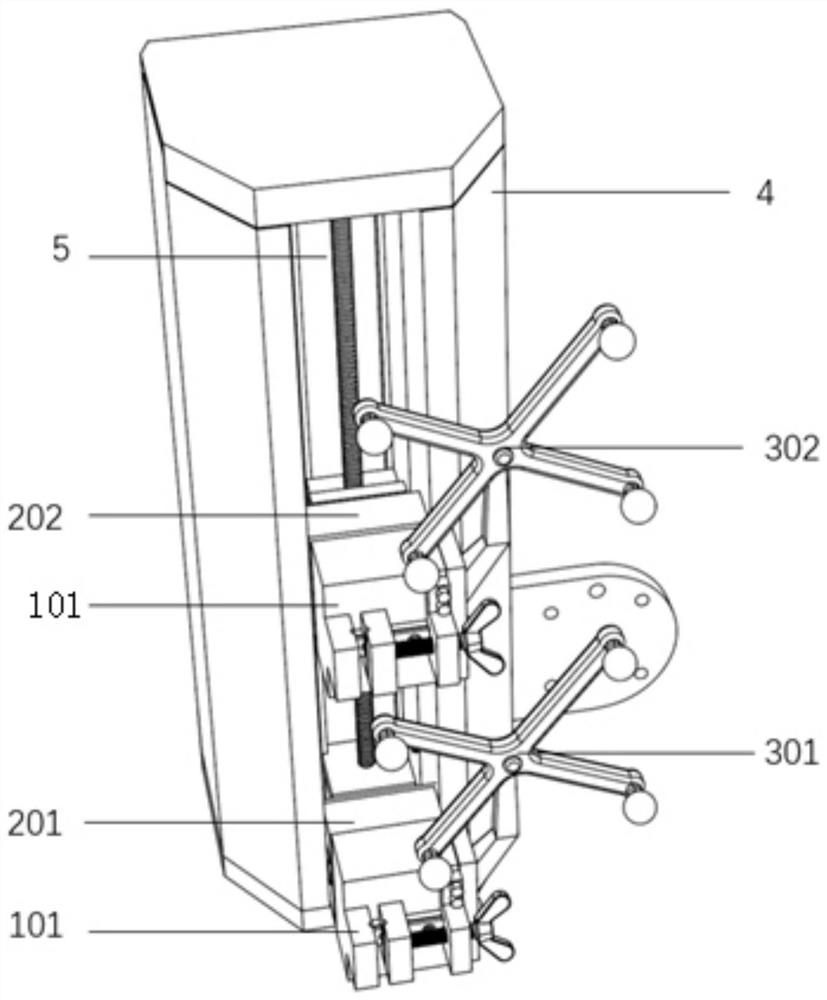
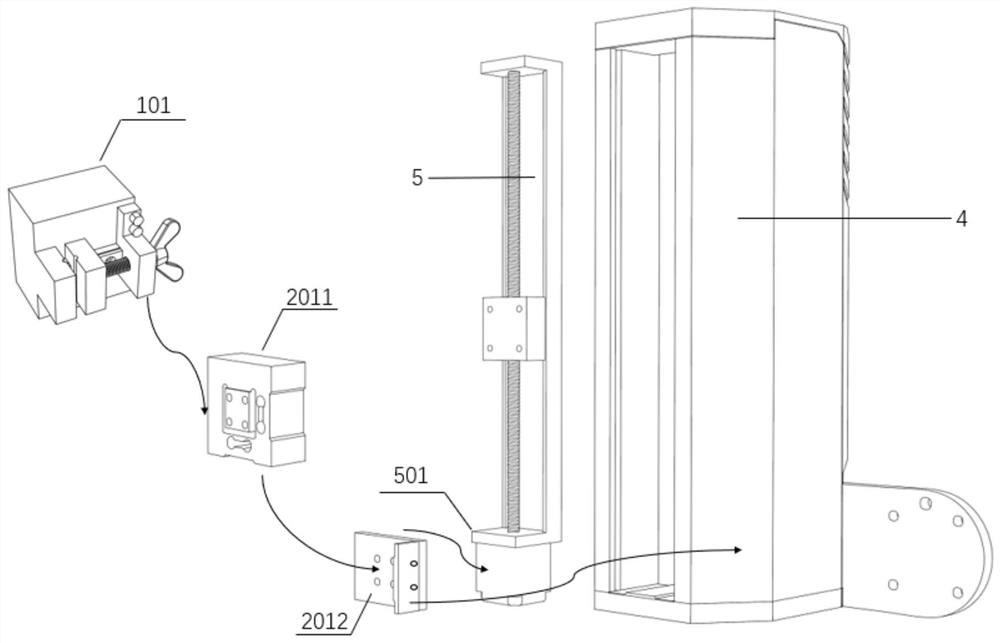
[0057] see Figure 1 to Figure 6 As shown, this embodiment provides an optical force fusion terminal holder, including a near-infrared optical positioner 3 and a clamping mechanism installed at the end of a six-degree-of-freedom mechanical arm 7. The clamping mechanism includes a force-bearing puncture needle Acquisition device, puncture needle clamping device, packaging box 4 and motor sliding module 5 packaged in the packaging box 4; said puncture needle force collection device includes puncture needle lateral force collection end 201 and a lateral force collection end located at the puncture needle The radial force collection end 202 of the puncture needle above 201, the lateral force collection end 201 of the puncture needle includes a first three-dimensional force sensor 2011 and a first ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More