X-type four-rotor unmanned aerial vehicle control method based on fault diagnosis result
A four-rotor unmanned aerial vehicle, fault diagnosis technology, applied in the direction of attitude control, non-electric variable control, control/regulation system, etc. Problems such as failure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
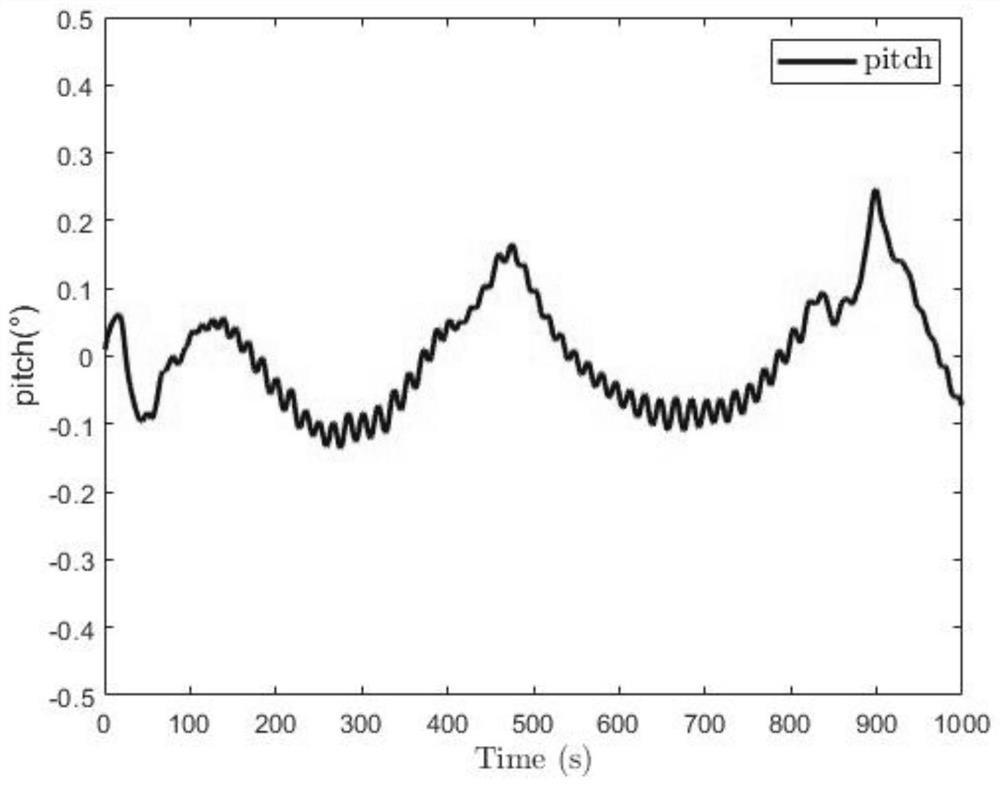
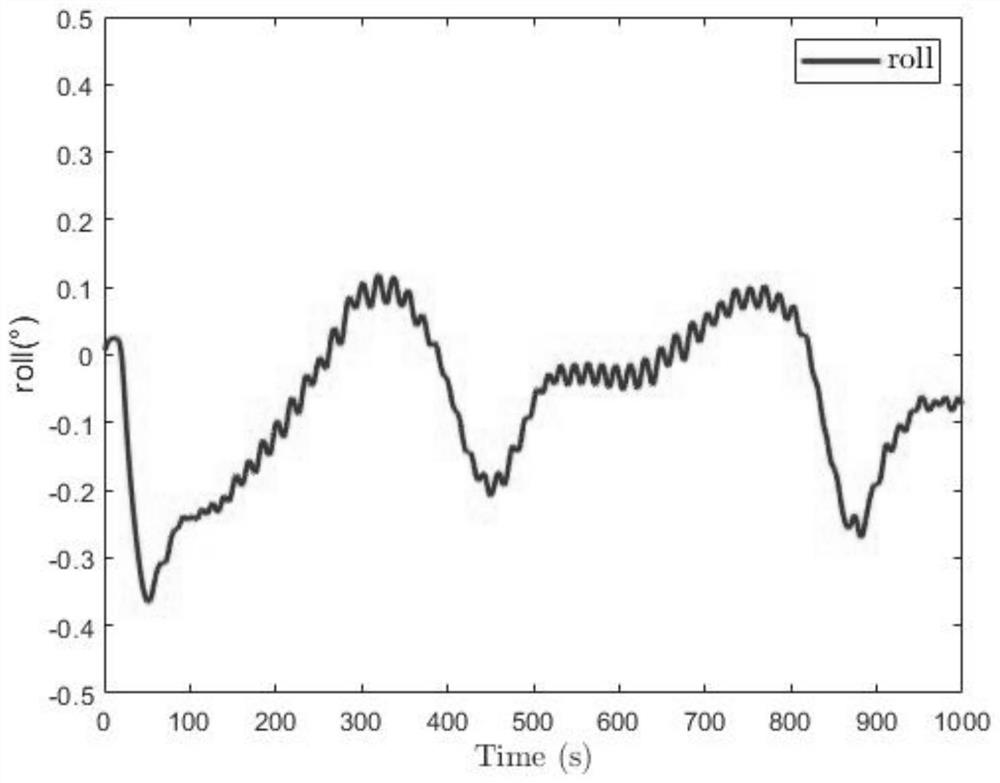
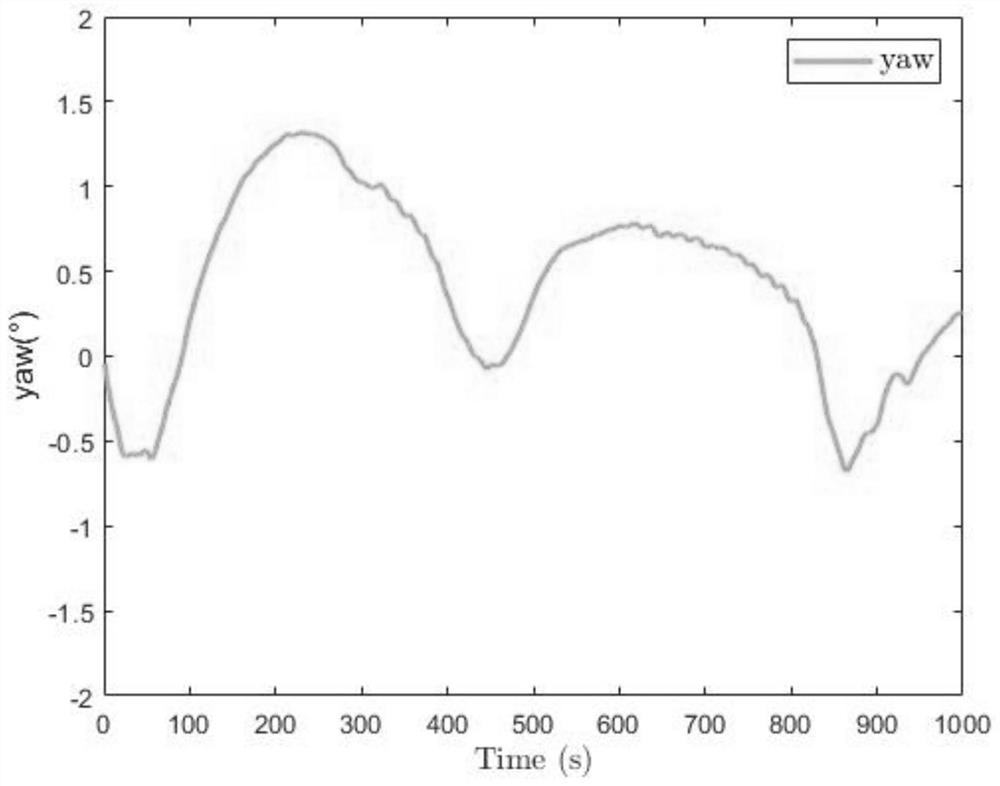
[0091] For the position and attitude system of the X-type quadrotor UAV, the specific simulation parameters are as follows: the inertia matrix parameters are I x =1.75×10 -2 kg·m 2 , I y =1.75×10 -2 kg·m 2 , I z =3.18×10 -2 kg·m 2 ;Mass is 1.5kg, propeller lift coefficient is 1.11×10 -5 N / (rad / s) 2 , the propeller torque coefficient is 1.49×10 -7 N·m / (rad / s) 2 , the motor speed ratio parameter is 646rad / s, the motor speed paranoid parameter is 166rad / s, and the moment of inertia of the rotor is 9.9×10 -5 kg·m 2 .
[0092] The simulation experiment environment is set as follows, the initial attitude value is [0,0,0]rad, the initial position value is [0,0,5]m, the target position is [0,0,5]m, given the initial disturbance, that is The initial angular velocity is [0.5,0.5,0.5]rad / s, the initial velocity is [0.5,0.5,0.5]m / s,
[0093] During the simulation process, according to the self-state and fault diagnosis of the X-type quadrotor UAV, the present invention uses ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More