

High-real-time motion control system and method
A motion control system, motion control technology, applied in general control systems, control/regulation systems, program control, etc., can solve problems affecting tracking accuracy, system dynamic performance constraints, long project cycle, etc., to improve tracking accuracy, solve Delay problems, the effect of complexity reduction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be described in further detail below in conjunction with the accompanying drawings.
[0039] The present invention is a high real-time motion control system and method proposed aiming at the time-lag problem of the existing control system, therefore, the system and method of the present invention can be used to solve the time-lag problem of any control system. However, in order to illustrate the principle and structure of the present invention in detail, the following embodiments only use the telescope satellite pointing and tracking control as an example to describe in detail.
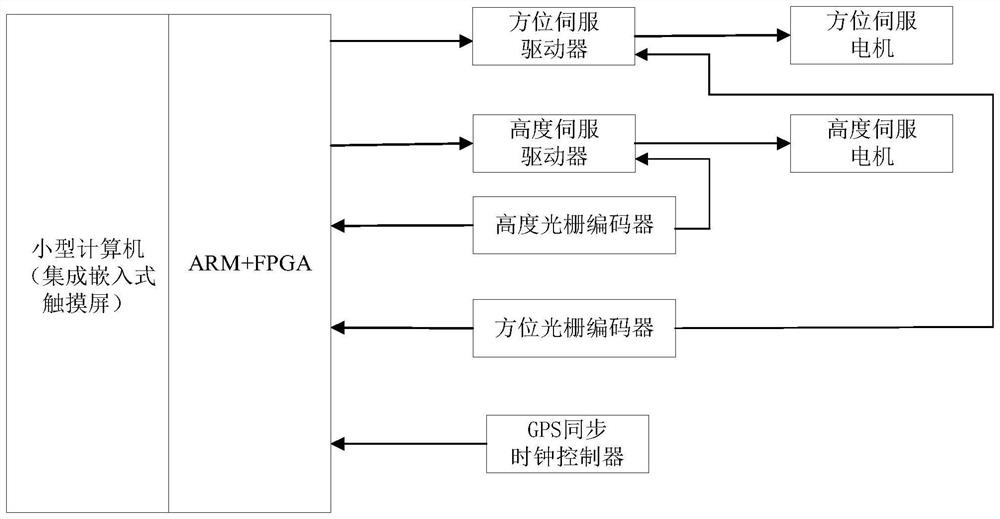
[0040] The high real-time motion control system of this embodiment is as figure 1 As shown, the system is a servo motion control scheme based on ARM and FPGA, mainly including: a small computer (in this embodiment, the small computer has an embedded touch screen with an operating system), a servo control system composed of ARM+FPGA Hardware architecture, azimuth serv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More