

Disc type grinding head-workpiece contact interface angle deviation estimation and compensation method
A contact interface and grinding head technology, which is applied to the parts of grinding machine tools, the control of workpiece feed movement, grinding machines, etc., can solve the problems of expensive testing equipment, complicated operation and calculation process, etc. Surface quality, practical value of practical engineering theory, simple effect of clamping error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] Embodiments of the present invention will be further described in detail below in conjunction with the accompanying drawings and examples. The following examples are used to illustrate the present invention, but should not be used to limit the scope of the present invention.
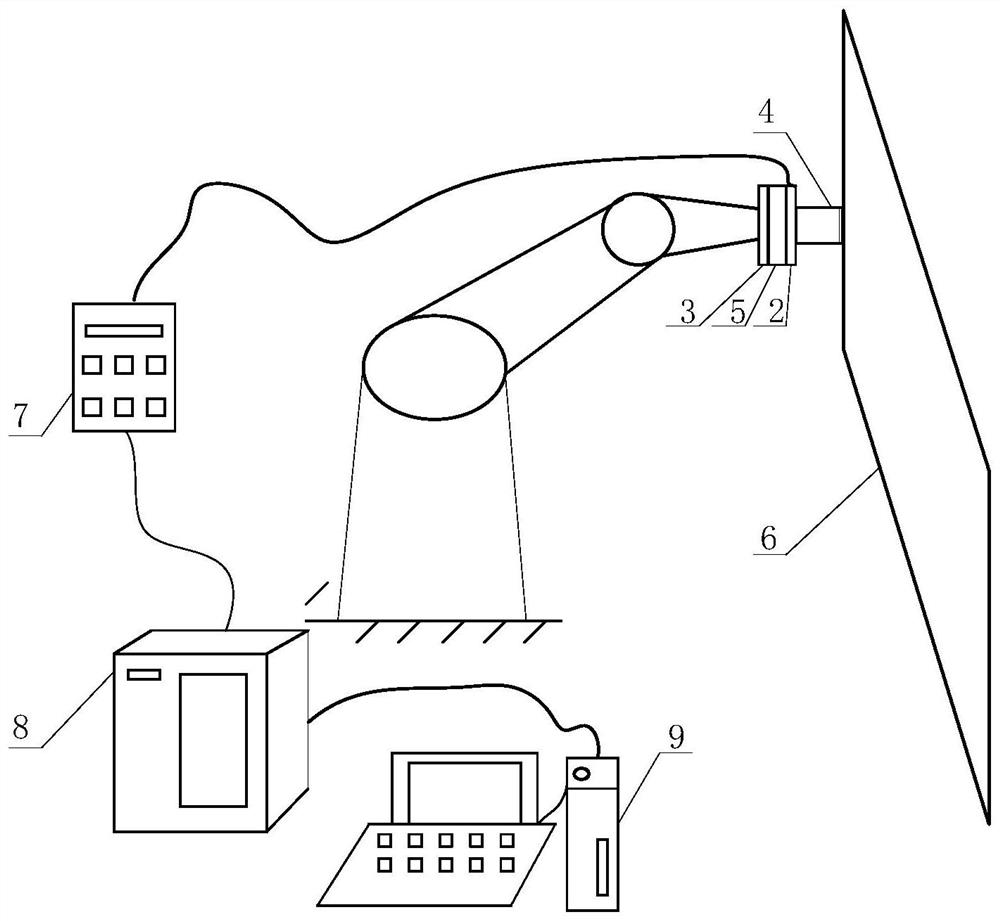
[0031] Such as figure 2 As shown, the hardware equipment used in the disc grinding head-workpiece contact interface angle deviation estimation and compensation method in the embodiment of the present invention includes a six-dimensional force sensor, a disc grinding head and a robot for grinding. The end of the robot passes the first method The blue plate is equipped with a six-dimensional force sensor. The six-dimensional force sensor is connected to the upper position through the data acquisition system through the signal line. The robot has a control system for grinding and processing. For example, a six-axis industrial robot can be used. The other end of the six-dimensional force sensor It i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More