

Endoscopic surgical instrument conveying device, control method and robot system
A technology of surgical instruments and delivery devices, which is applied in the field of medical equipment, can solve problems such as narrow surgical operation triangle, unstable operating platform, and few surgical instruments, and achieve the effects of ensuring follow-up effect, convenient and effective positioning, and convenient transportation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
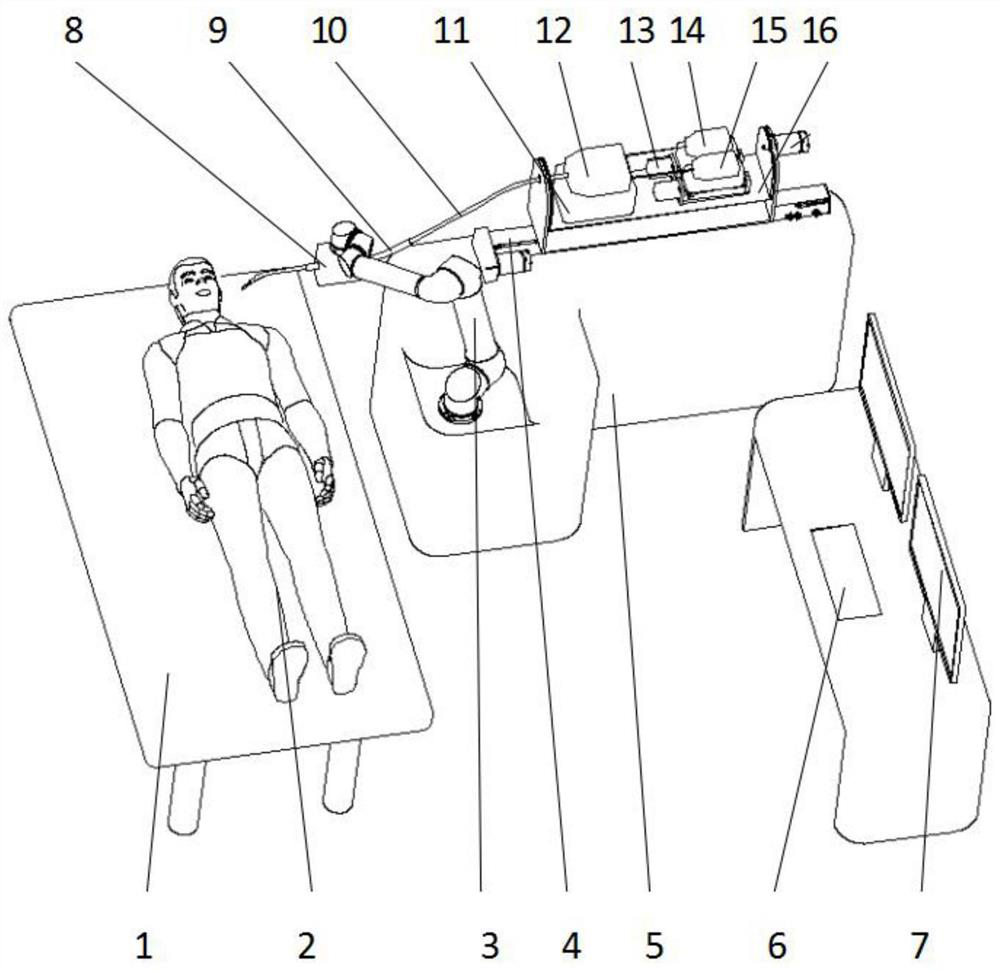
[0044] like Figure 1-6 Shown: In this embodiment, an endoscopic surgical instrument delivery device is described, which is an important part of the endoscopic surgical robot system, and is used to insert the mirror body into the tube and the instrument hose during the endoscopic surgery Drive and insert into the surgical channel, and perform corresponding surgical operations at the lesion position.
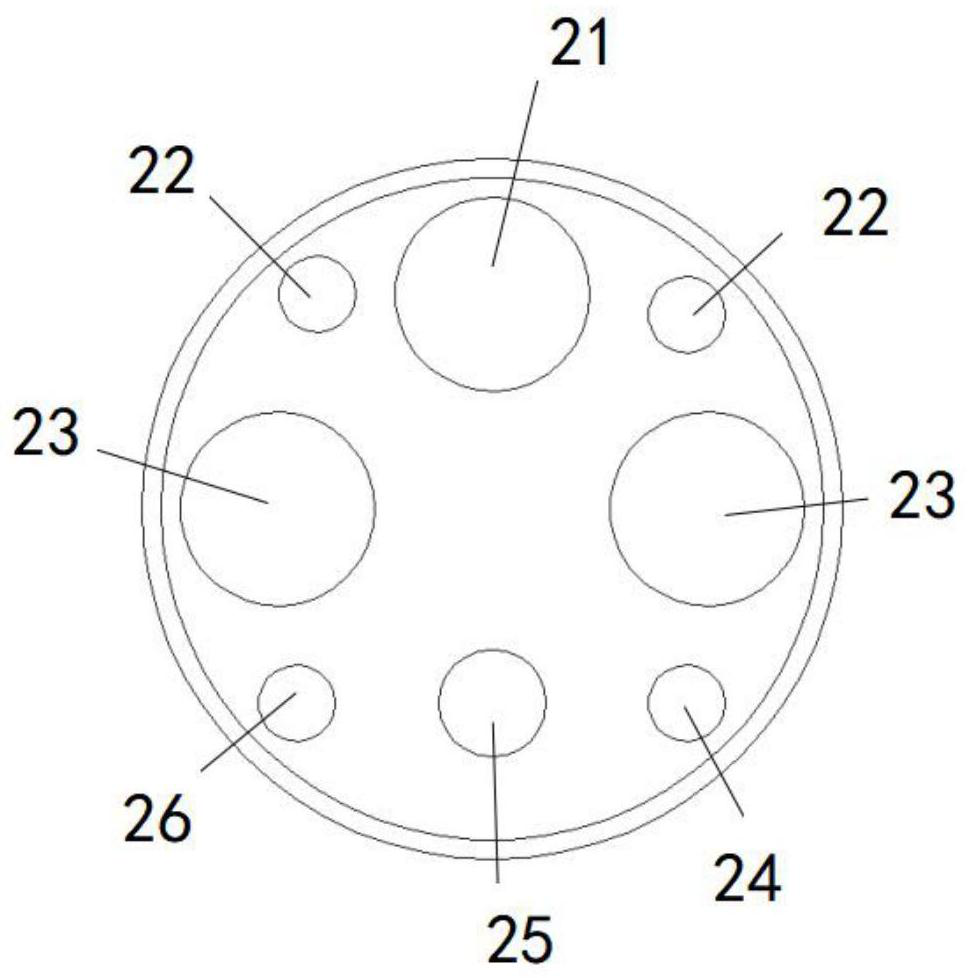
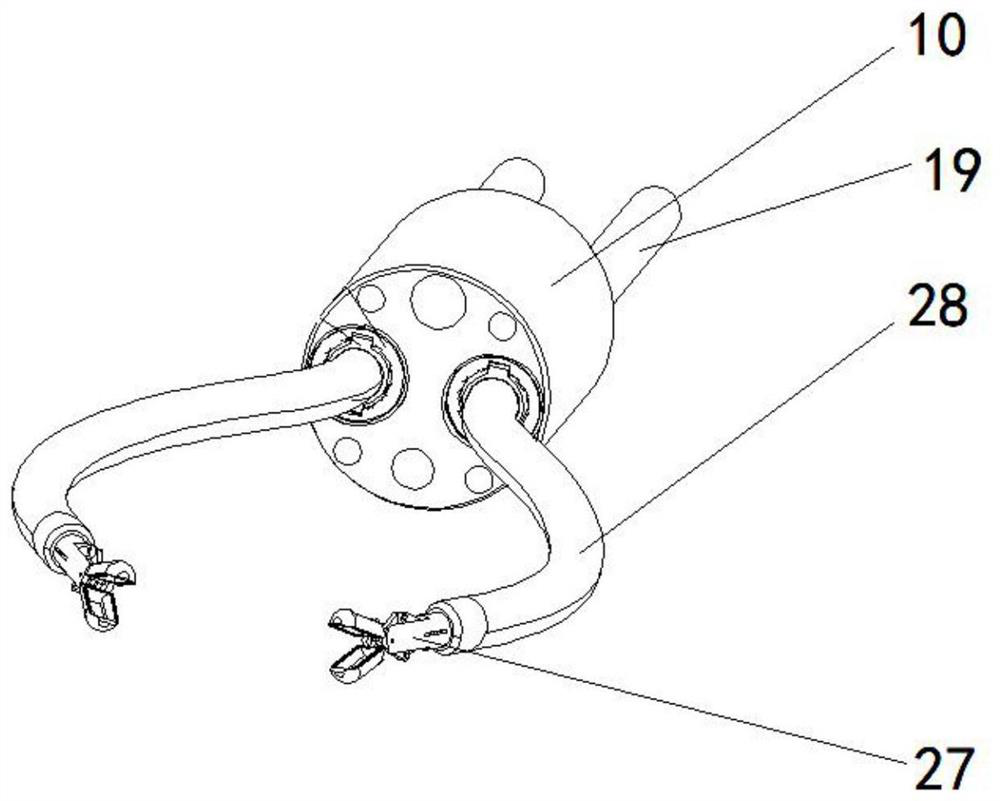
[0045] Specifically, combined with figure 2 It can be seen that in this embodiment, the scope insertion tube 10 includes a plurality of functional channels, specifically a camera channel 21 , a light source channel 22 , an instrument channel 23 , a magnetic navigation sensor channel 24 , a biopsy channel 25 and a water vapor channel 26 . Among them, the camera channel 21 is used to install the camera device for collecting the internal image of the human body, so that the image is transmitted to the external display 7 through the signal transmission line, so that the operator ca...
Embodiment 2
[0064] On the other hand, this embodiment also provides a method for controlling an endoscopic surgical instrument delivery device, based on the endoscopic surgical instrument delivery device in Embodiment 1, including:
[0065] When in the adjustment and alignment phase, control and adjust the posture of the multi-degree-of-freedom robotic arm 3;
[0066] Real-time acquisition of the spatial position of the pipe delivery assembly 8 on the multi-degree-of-freedom mechanical arm 3;
[0067] Calculate the sliding distance converted into the first driving platform 16 according to the spatial position, and control the first driving assembly 4 to drive the first driving platform 16 to slide according to the sliding distance;
[0068] Complete the synchronous movement and alignment of the scope insertion tube 10;
[0069] After the alignment of the scope insertion tube 10 is completed, the multi-degree-of-freedom mechanical arm 3 is kept stationary, and the first driving assembly 4...
Embodiment 3
[0075] In this embodiment, an endoscopic surgery robot system is provided, which is used to drive and insert the scope insertion tube and the instrument hose into the surgical channel during the endoscopic surgery, and perform corresponding surgical operations at the lesion position. And it is equipped with an observable device and a device that can input corresponding instructions, as well as the endoscopic surgical instrument delivery device mentioned in Embodiment 1.
[0076] Specifically, in this embodiment, the robot system for endoscopic surgery includes a robot base 5 , a multi-degree-of-freedom robotic arm 3 , a first driving platform 16 , a second driving platform 13 , a control module, an operating console 6 and a display 7 .
[0077] The multi-degree-of-freedom mechanical arm 3 is connected to the robot base 5, and the operating end of the multi-degree-of-freedom mechanical arm 3 is provided with a pipe fitting delivery assembly 8, and the pipe fitting delivery assem...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More