Massaging robot acupoint detecting and positioning method based on YOLO
A positioning method and robot technology, applied in the field of physiotherapy robots, can solve the problems of complex backgrounds that are not universal, the level of intelligence is far apart, and the massage background is single, so as to eliminate the interference of similar targets, widen the application, and reduce the detection area. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0076] like figure 1 As shown, the embodiment of the present invention provides an YOLO-based massage robot acupoint detection and a positioning method, the execution body of the present embodiment can be a massage robot or robot, which is mainly within the robot. In particular, the YOLO network model of the present embodiment is the highest version of the YOLO network model such as a V5 version, and the method of the present embodiment includes the following steps:
[0077] A10, collecting the original image of the human body with a circular acupuncture point;
[0078] The acquisition in this step can be an ordinary collection of any camera. Usually the category of acupuncture stickers may include a white acupoint sticker or a black acupoint sticker. In other embodiments, it may also be other colors, which are not limited thereto, and according to actual needs, the scheme of the present embodiment can be illustrated in black and white category.
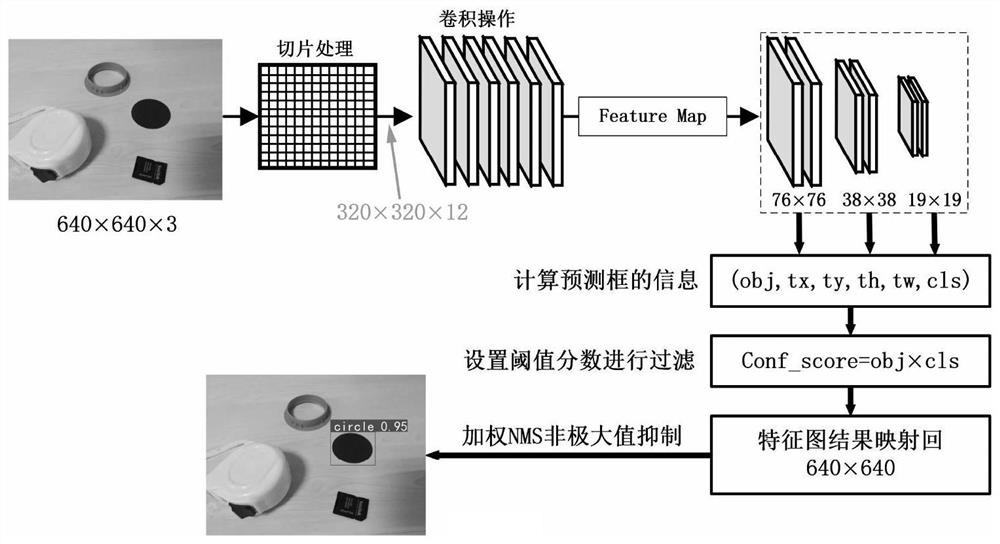
[0079] A20, using the YOLO networ...
Embodiment 2
[0102] In the current field of robotic therapy, body points to identify and locate key issues massage robot, the robot is a prerequisite to ensure security. In this embodiment the artificial binding site and a depth marker detection learning objectives, the proposed method for detection and location massage points based YOLO robot.
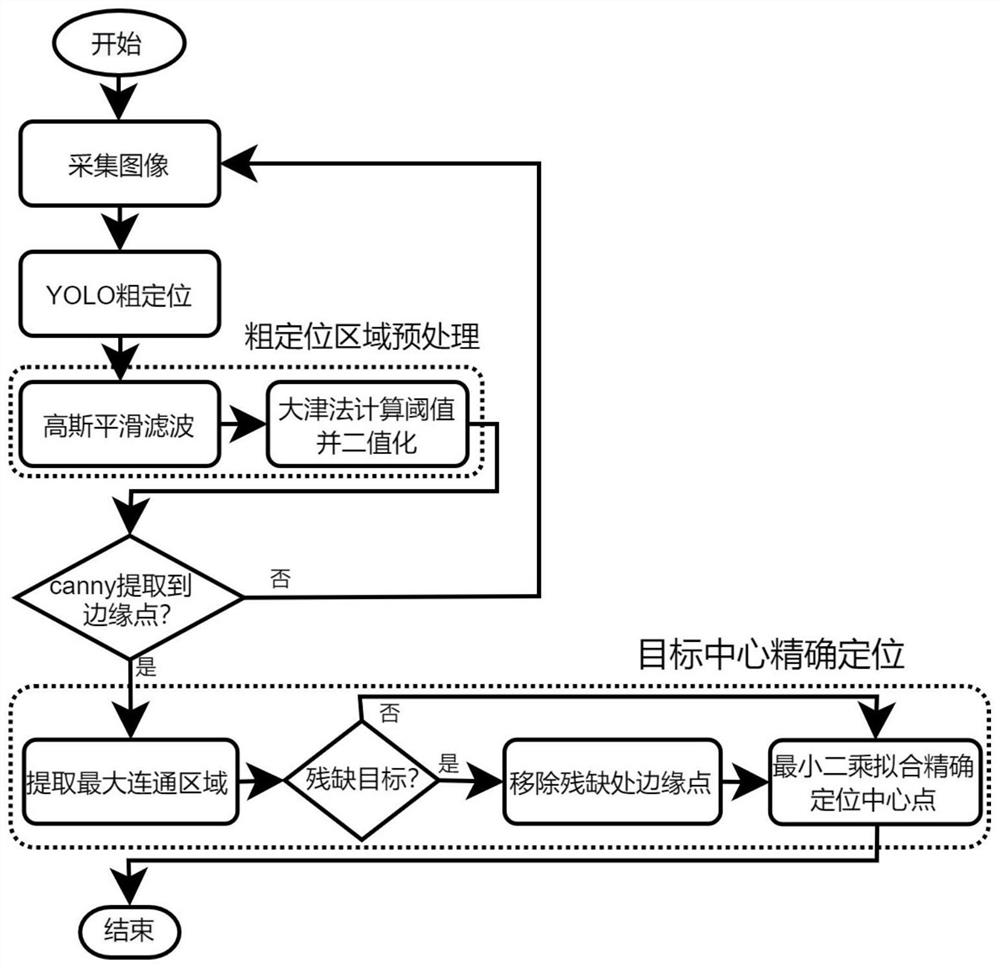
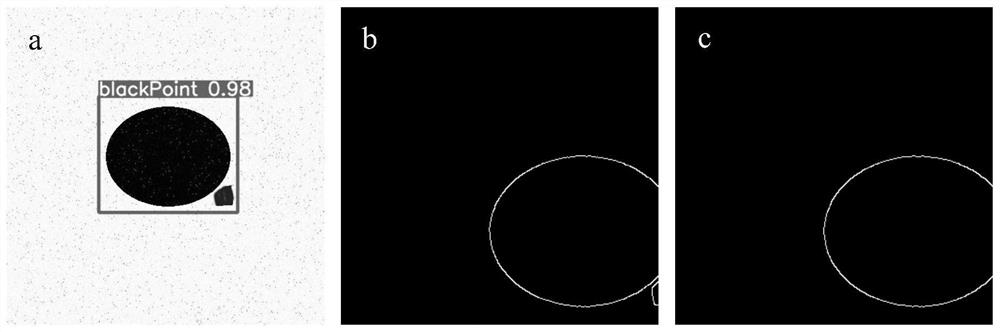
[0103] The method consists of two parts: coarse positioning circular points and the center of paste precise positioning. The method of flow figure 1 Indicated. First, a network model YOLO paste coarse positioning circular points, then the Gaussian filter combined Otsu and Canny algorithm, to obtain edge points of the circular mark, to further exclude non-target based on the detection result by the edge extraction method of the largest connected component interference points, and finally by the least squares method to the center coordinates of artificial landmarks precise positioning, and use of existing robot hand-eye calibration technology into the r...
Embodiment 3
[0141] A third aspect of the present application provides a robot, comprising: a memory, a processor and a memory and the computer program runs on a processor in the memory, to achieve any one of the above embodiments, when executed by the processor of a computer program based on the step point massage YOLO detection and location of the robot.
[0142] Robot may comprise: at least one processor, at least one memory, the at least one network interface and other user interface. Its various components are coupled together by a bus system. It appreciated, a bus system for implementing communications connections between these components. In addition to a data bus system includes a bus, but also include a power bus, control bus, and a status signal bus. Wherein the user interface may include a display, a keyboard or a pointing device (e.g., a mouse, a trackball (Trackball) or touch panels.
[0143] It will be appreciated, embodiments of the present embodiment the memory may be volatile ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More