Mooring multi-rotor unmanned aerial vehicle power management device and method
A multi-rotor unmanned aerial vehicle, multi-rotor unmanned aerial vehicle technology, which is applied to ground devices, circuit devices, battery circuit devices and other directions for mooring aircraft, and can solve problems such as unfavorable stagnation flight, current increase, large back electromotive force, etc. problems, to achieve the effect of protecting drones, ensuring safety, and prolonging life.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
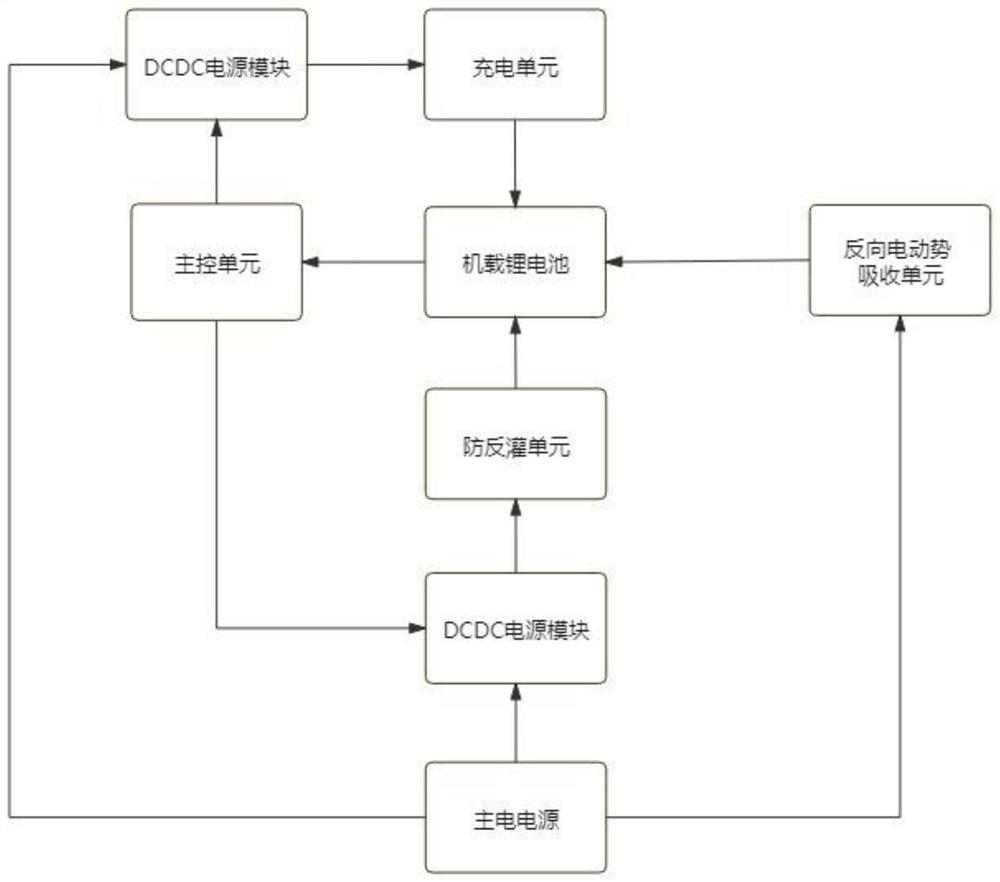
[0058] Such as figure 1 As shown, the present invention is a tethered multi-rotor unmanned aerial vehicle power management device. to ensure flight safety;
[0059] The power management device includes a main control unit, an anti-backfeed unit, a back electromotive force absorption unit, a charging unit, a DC-DC power supply module, a main power supply, an on-board lithium battery and a DC-DC power supply module; the main control unit is connected to a DC -DC power supply module, the main power supply is connected to the DC-DC power supply module, the main power supply is connected to the back electromotive force absorption unit, the DC-DC power supply module is connected to the charging unit, the DC-DC power supply module is connected to the anti-backfeed unit, and the charging unit is connected to the airborne Lithium battery, the reverse electromotive force absorption unit is connected to the onboard lithium battery, the anti-backfeed unit is connected to the onboard lith...
Embodiment 2
[0083] The difference between this embodiment and Embodiment 1 is that this embodiment provides a power management method for a tethered multi-rotor UAV, which is applied to the power management device for a tethered multi-rotor UAV. Methods include:
[0084] When the ground power supply with an external voltage of 1KV supplies power to the tethered multi-rotor drone, the voltage of the ground power supply of 1KV is first converted to the voltage of the main power supply of the tethered multi-rotor drone 50V;
[0085] The input main power supply voltage is converted to the voltage required by the charging unit and the main control unit through the DC-DC power module, and the charging unit is configured with an output voltage of 50V and a current limit of 5A; the main power supply is isolated from the onboard through the anti-backfeed unit Lithium battery to prevent backflow of the main power of the load; the backup power supply absorbs the back electromotive force through the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com