

Laser point cloud and dense matching point cloud fusion method
A dense matching, laser point cloud technology, applied in the field of remote sensing surveying and mapping, can solve problems such as point cloud cannot be moved effectively, point cloud fusion cannot be realized, scene point cloud is complicated, etc., to achieve good application prospects, good high-quality fusion, and improve smoothness effect of effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
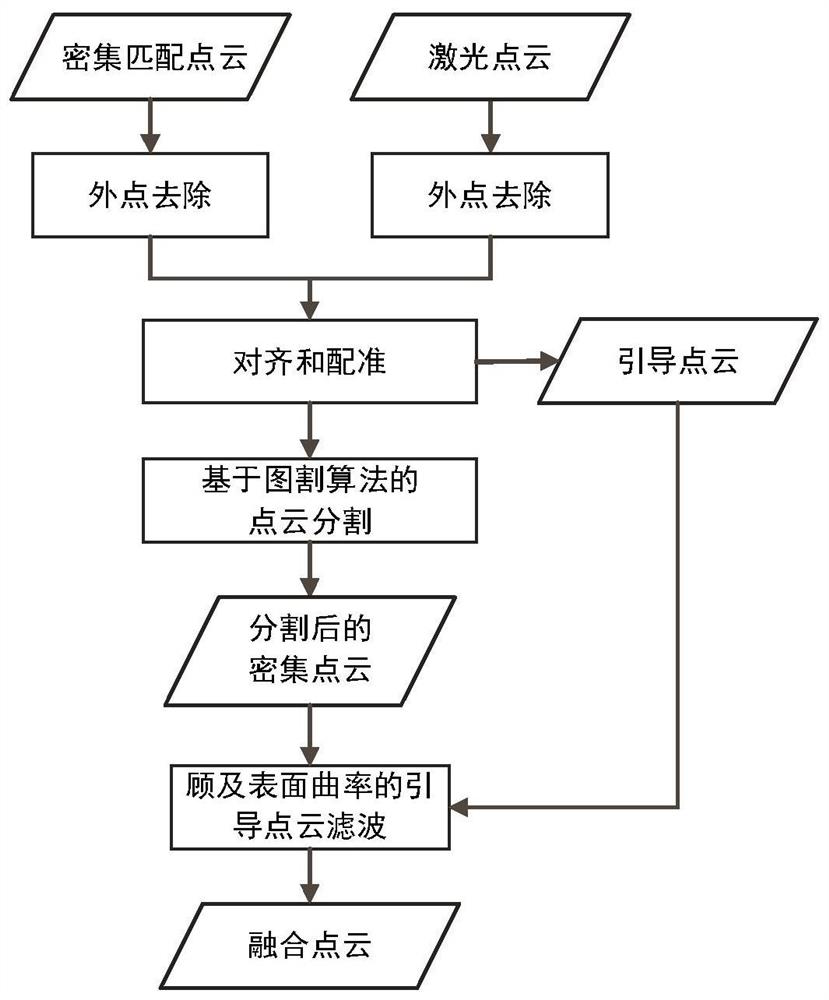
[0054] Due to the complex structure of the outdoor scene, high-rise buildings, ground vegetation, and ground objects have cascading occlusions, and it is difficult for the point cloud obtained by a single sensor to fully display the details of the target object. Therefore, it is necessary to consider fusing point cloud data from different sensors to reconstruct a more accurate 3D scene. Most of the traditional point cloud fusion algorithms realize the splicing of two types of heterogeneous point clouds through the registration algorithm, but there is a point offset in the overlapping part of the dense point cloud and the laser point cloud, that is, the spliced point cloud is prone to "double wall" layering question. Such point clouds with noise and redundant information pose a great challenge to subsequent mesh reconstructi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More