Underground pipeline detection robot detection system and detection method
A pipeline robot and underground pipeline technology, applied in the field of underground pipeline detection robot detection system, can solve the problems of time-consuming, labor-intensive, high-risk, large volume, etc., and achieve the effects of convenient use, perfect function and small volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
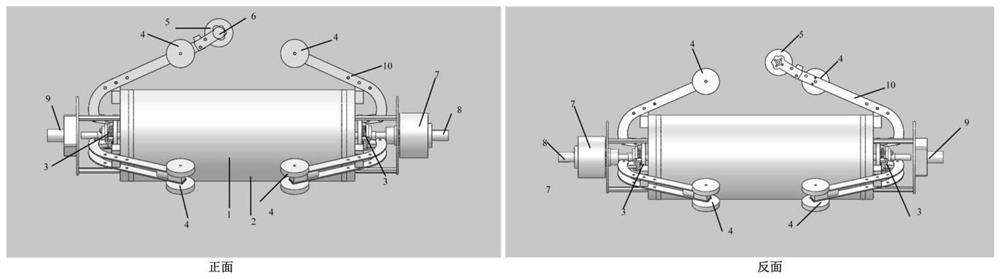
[0076] Such as figure 1 with image 3 As shown, the underground pipeline detection robot system based on visual salience perception proposed by the present invention consists of two parts: intelligent small pipeline robot hardware and obstacle target intelligent detection software.
[0077] 1. The underground pipeline detection robot system based on visual salience perception of the present invention, the intelligent small pipeline robot hardware includes:
[0078] Pipe robot main body 1;
[0079] The built-in control module 2 includes a Raspberry Pi microcomputer and an inertial navigation system, which are fixed inside the pipeline robot and are used to control the movement of the robot and the real-time positioning of the pipeline robot position.
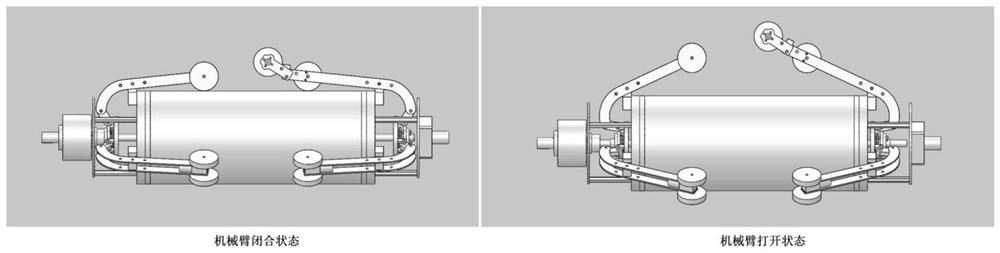
[0080] The stepper motor 3 is fixed on both sides of the main body of the pipe robot 1, and controls the forward and backward movement of the slider so that the power wheel 4 is opened and retracted to fit the pipe wall;
[00...
Embodiment 2
[0125] This embodiment provides a detection method for an underground pipeline detection robot, including:
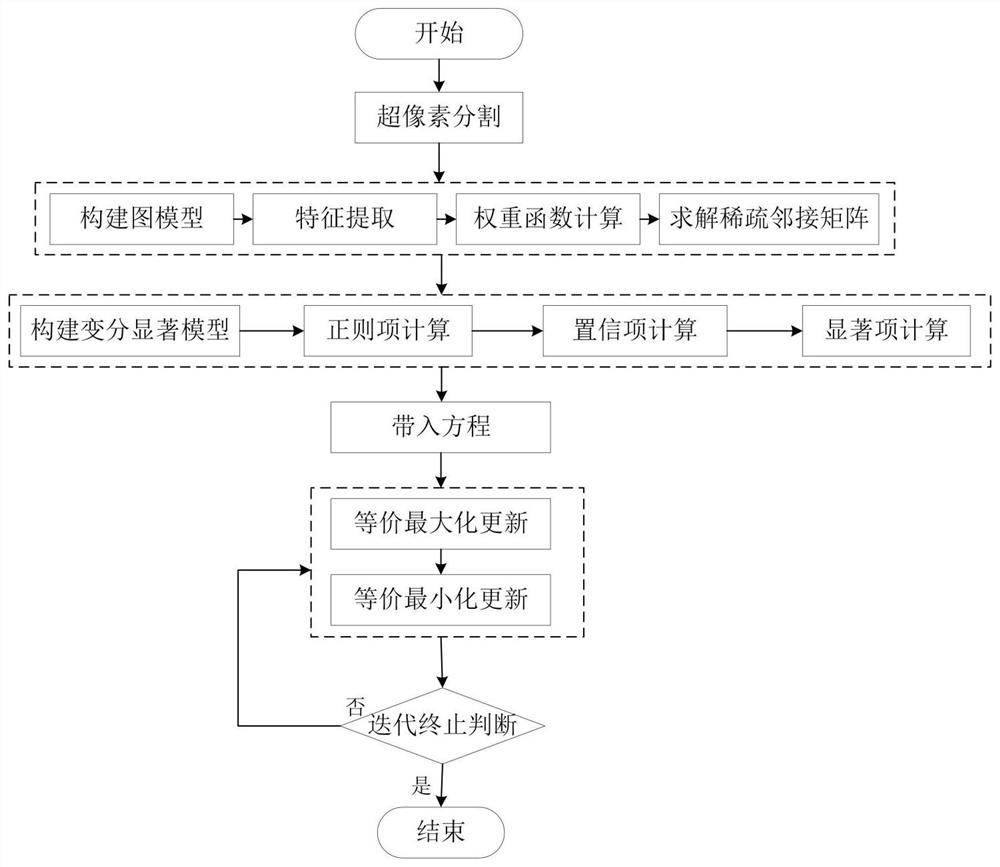
[0126] Step: 1: Use SLIC (Simple Linear Iterative Clustering) method to convert the input image from RGB to CIELAB color space, and divide the image into N non-overlapping superpixel blocks {1,2,..p,...q, ...N};
[0127] Step 2: According to the superpixel segmentation results, construct a graph model consisting of vertices and edges G=(V,E); then use the pre-trained FCN-32S network to extract the features of each pixel block and calculate its K-nearest neighbor matrix ,Specific steps are as follows:
[0128] (51) According to the superpixel segmentation result, traverse all superpixel blocks of the image, and use each superpixel block as a vertex V, and there is an edge E between the superpixel blocks, and the set of all vertices and edges constitutes a graph model G=(V ,E), where G represents the constructed graph model.
[0129] (52) Traversing all superpixel bloc...
Embodiment 3
[0161] This embodiment provides an underground pipeline detection robot detection device, including:
[0162] Superpixel segmentation program module module: the SLIC method is used to convert the input image from RGB to CIELAB color space, and divide the image into multiple non-overlapping superpixel blocks;
[0163] Graphical model building module: according to the image segmentation results, construct a graphical model consisting of vertices and edges G=(V,E); use the pre-trained FCN-32S network to extract the features of each pixel block, and calculate its K-nearest neighbor matrix ;
[0164] Variational saliency model construction module: according to the constructed graphical model, calculate the values of regular items representing prior information, confidence items, and significant items to construct a variational saliency model;
[0165] Iterative solution module: Solve the constructed variational saliency model through the primal-dual method, repeat the maximizati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com