

Multiple axes servo motion control device
A servo control device and servo motion technology, applied in the direction of program control manipulators, manufacturing tools, manipulators, etc., can solve the problems of low integration, complex structure, too special, etc., to improve anti-interference ability, simple circuit structure, and improve research efficiency effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described below in conjunction with accompanying drawing and embodiment:
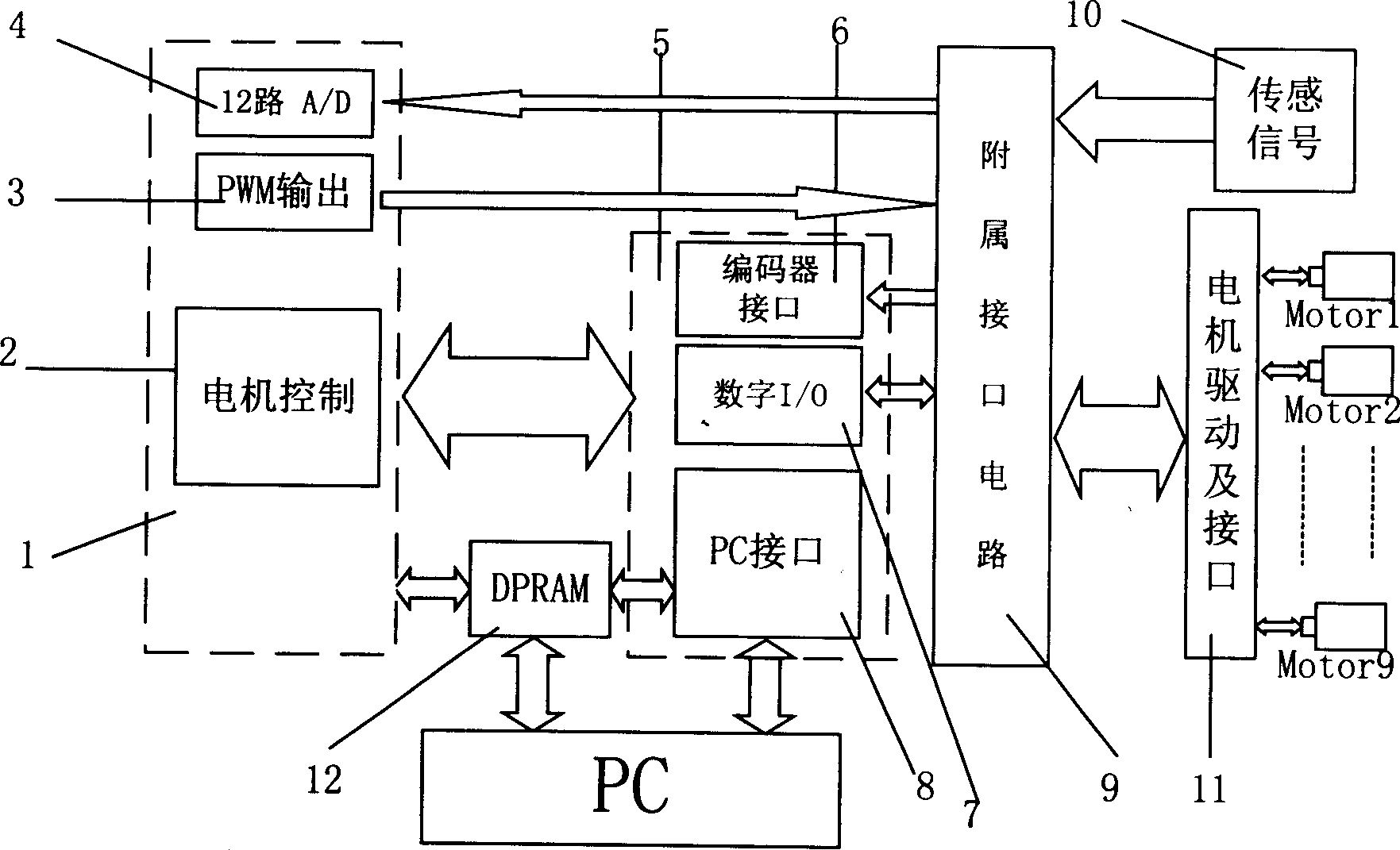
[0023] See figure 1 As shown, a multi-axis motor servo motion control device of the present invention is realized by a computer plug-in card structure, and is connected with a PC computer through an ISA bus, which can complete the servo control of 9 motors and simultaneously complete 12 analog sensor signals collection.
[0024] The existing motion controller based on DSP (Digital Signal Processor) adopts general-purpose DSP design, and must add more peripheral interface devices, which has complex structure, high cost and low integration level. In the present invention, motor control DSP circuit 1 is made up of motor control module 2, PWM output circuit 3, A / D conversion circuit 4, and motor interface circuit 5 is made up of encoder interface 6, digital I / O circuit 7 and PC computer interface circuit 8 The motor control DSP circuit 1 samples the motor rotat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More