

Active real-time three-dimensional positioning system based on binocular vision and laser distance detection
A laser ranging and real-time three-dimensional technology, applied in the field of active real-time three-dimensional position information acquisition system, can solve the problems of large amount of calculation, limited application field, poor precision, etc., and achieve good real-time performance, simple process and reduced calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
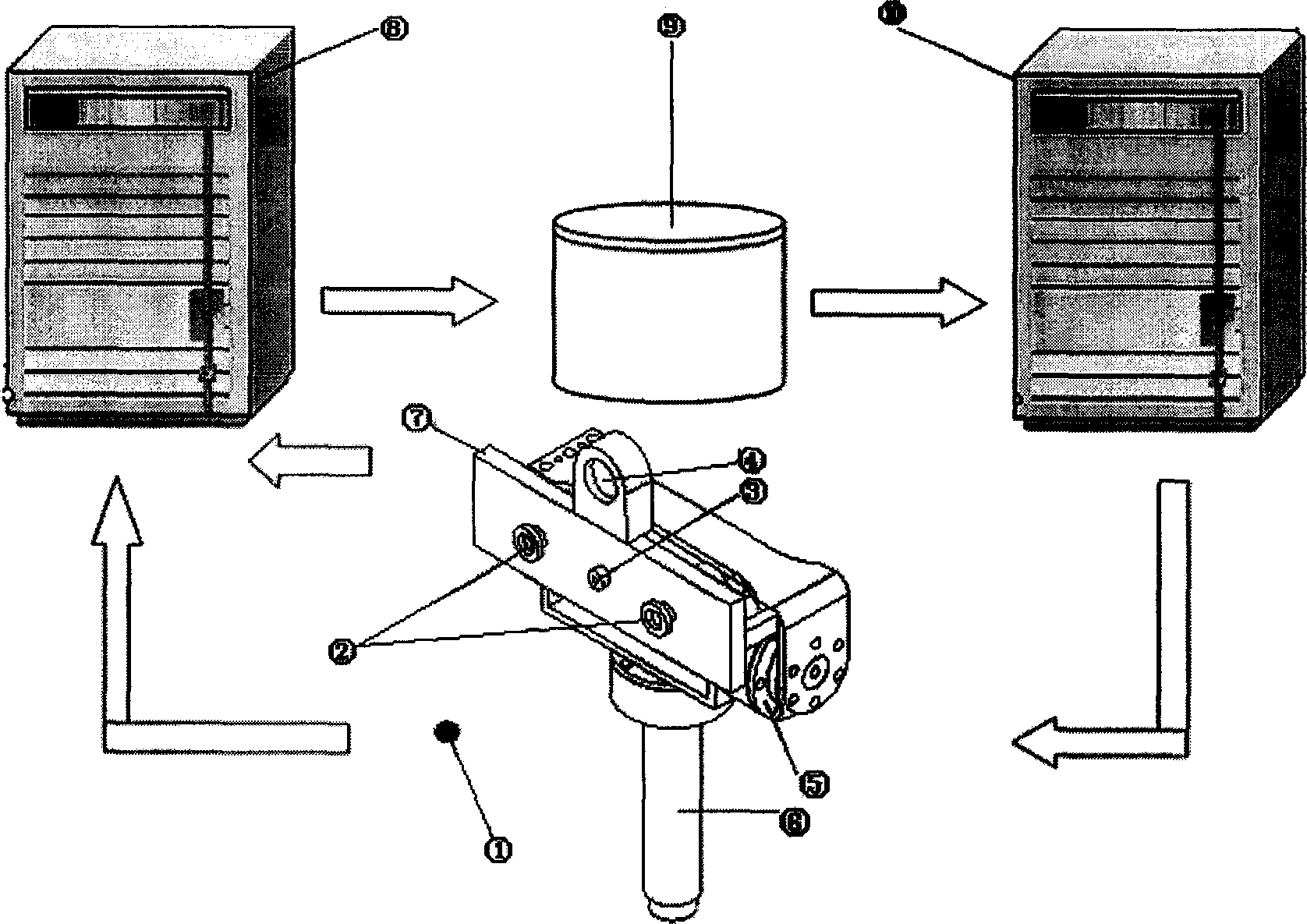
[0028] The specific steps of the system to achieve three-dimensional positioning are as follows:
[0029] The first step: the binocular camera 2 sends the image of the target 1 in the visual field to the image acquisition card in the vision processing computer 8
[0030] The second step: the image acquisition card converts the image signal into a digital signal, which is handed over to the visual processing computer 8( image 3 ) to process, calculate the two-dimensional position of the target on the visual plane and send this information to the public storage area 9 li.
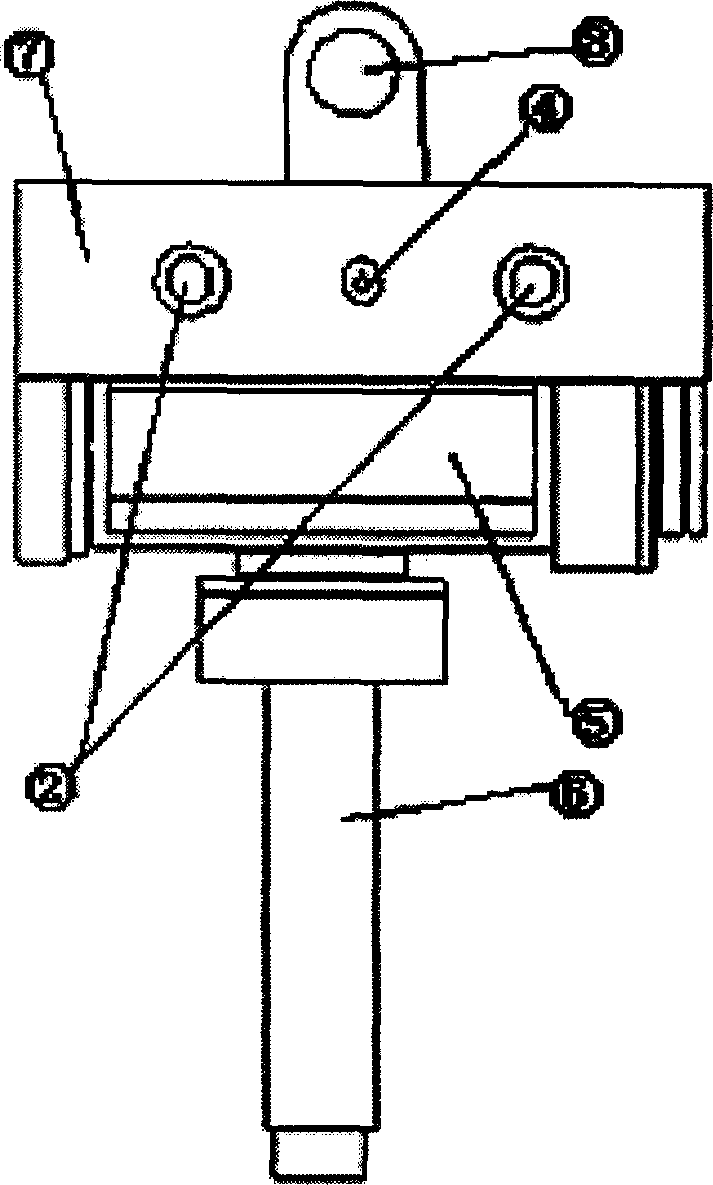
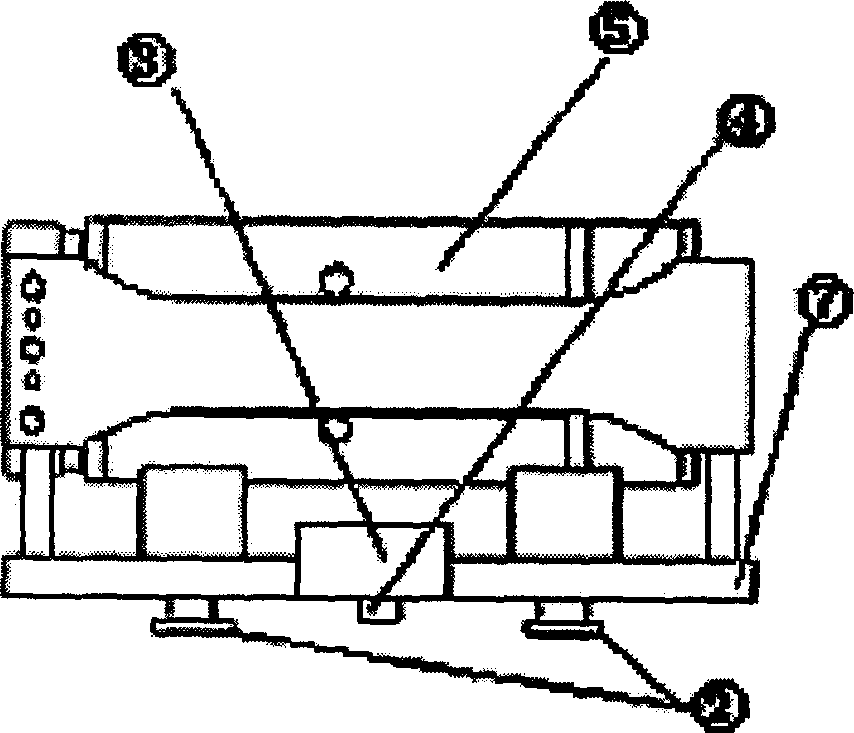
[0031] The 3rd step: control computer 10 reads the position data in the public memory area 9, by control program ( Figure 4 ) coordinate transformation and real-time motion planning according to the installation positions of the camera 2 and the semiconductor laser emitter 3 .
[0032] Step 4: The control program sends the driving signal to the built-in D / A board of the control computer 10 . After the D / ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More