

Monorail anchoring and supporting cooperative machine for fully mechanized excavation face
a technology of mechanized excavation and monorail, which is applied in the direction of mine roof caps, shaft equipment, protective covers, etc., can solve the problems of supporting operating speed, low anchoring, and further improvement of fully-mechanized production capacity, and achieves good maneuverability of equipment, reduces the size of subsidiary transporting devices, and reduces the volume of the whole set of equipment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057]In order to make it easy to understand the technical means, creation features, achieved purpose and effectiveness of the present invention, the following is a further detailed description of the present invention with reference to the attached drawings and the specific implementation. It should be understood that the specific embodiments described herein are merely used to explain the present disclosure but are not intended to limit the present disclosure.
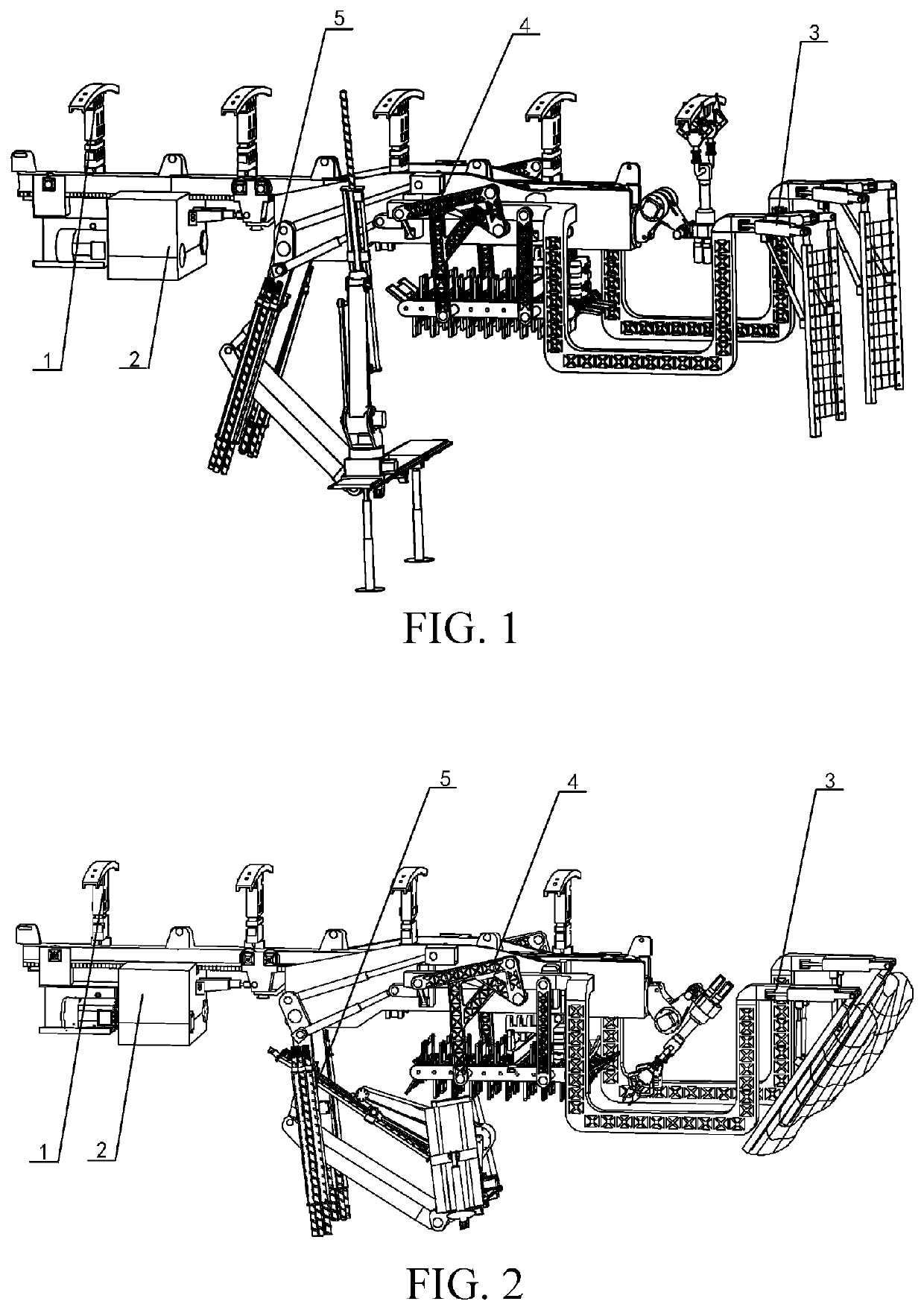
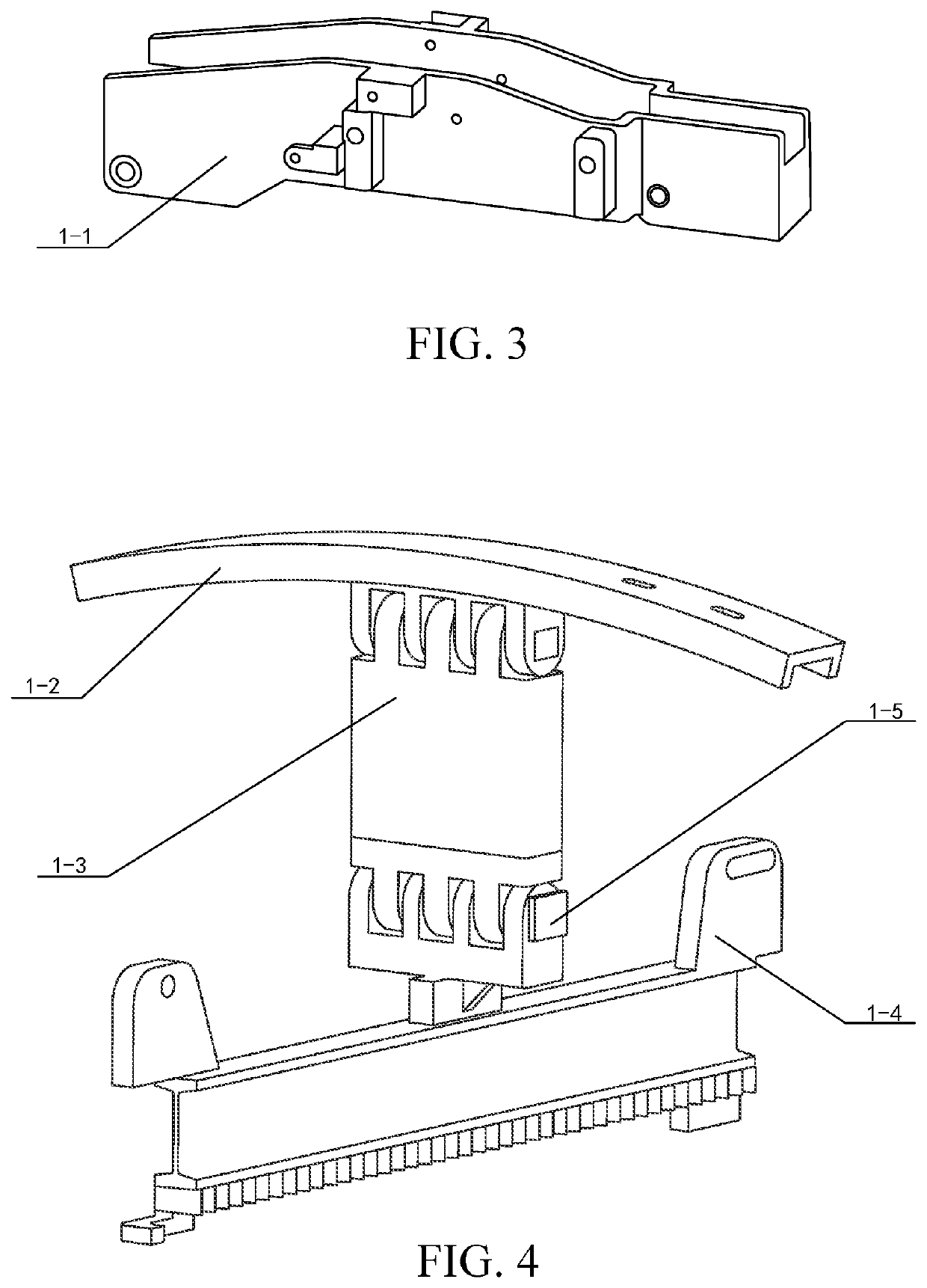
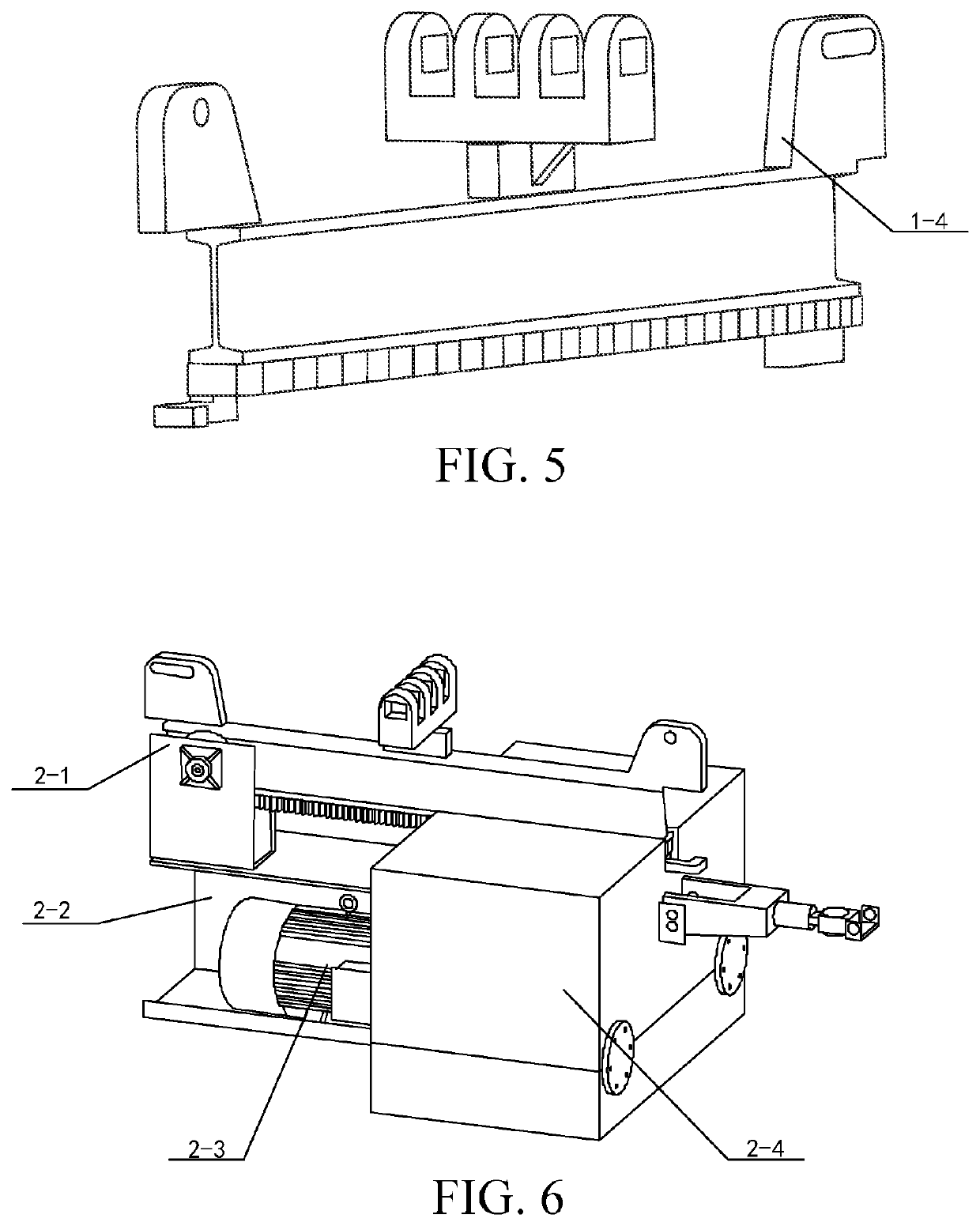
[0058]Referring to FIG. 1 and FIG. 2, a monorail anchoring and supporting cooperative machine for a fully mechanized excavation face includes a suspension support system 1, a power system 2, an advanced support system 3, a subsidiary transport system 4 and an anchoring robot system 5. The suspension support system 1 is fixed on a top end of a coal mining tunnel through an anchor rod to provide support for the whole set of equipment. The power system 2 is mounted at a tail end of a system main beam 1-1 in the suspension suppor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More