

Speed control method for AC motor servo system
A servo system and AC motor technology, applied in the direction of motor generator control, electronic commutation motor control, control system, etc., can solve the problem of measurement noise sensitivity, inability to target speed and dynamic response performance, design controller, and observer stability analysis Difficulty and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following the described embodiment.
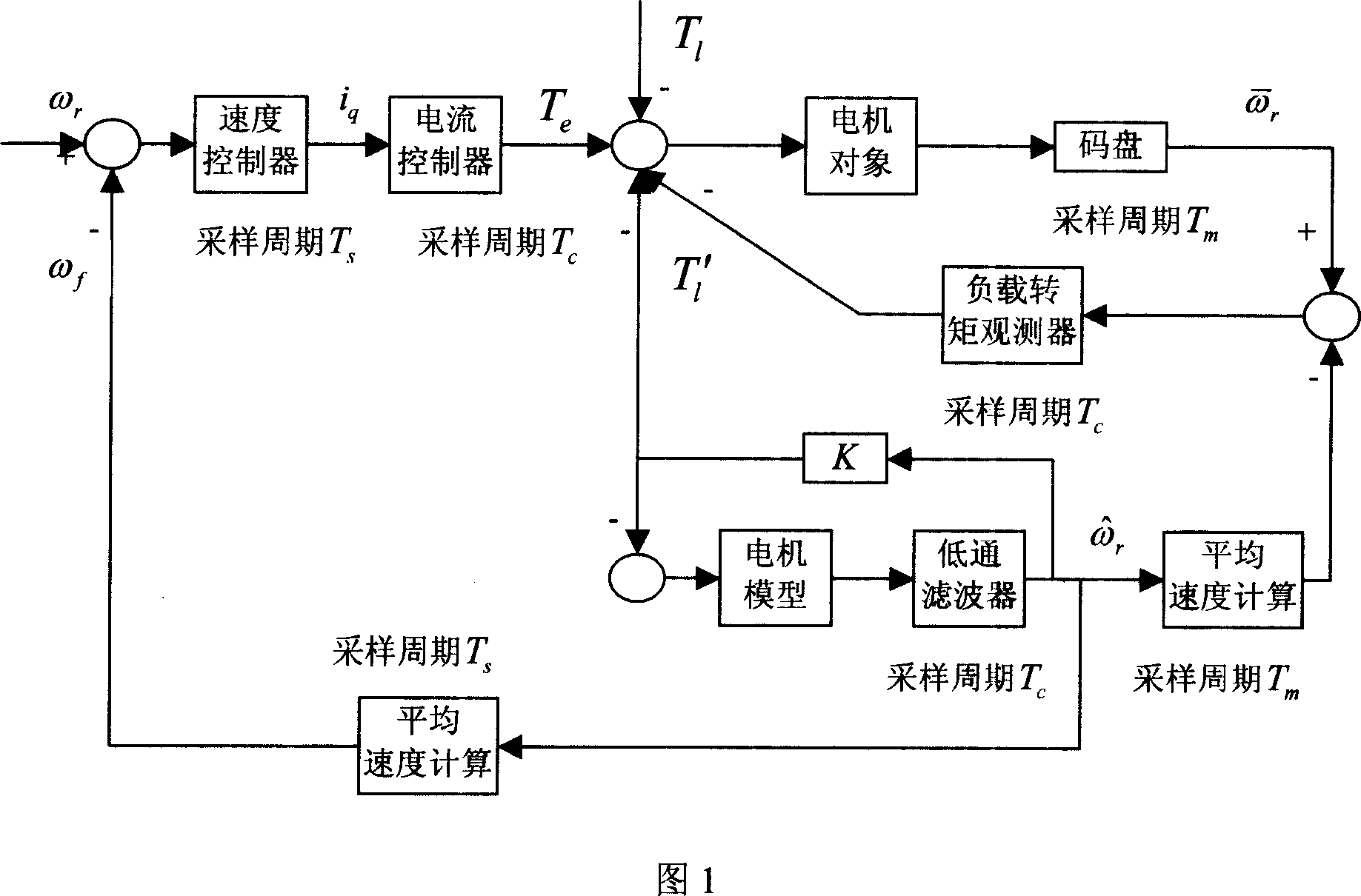
[0020] As shown in Figure 1, after the system enters the control stage, the user sets the target speed ω according to the actual motor working conditions r , in order to ensure the correctness of the velocity observer, the control variable ω f As feedback quantities, observers are used to predict load torque disturbances and continuous speed changes at low speeds in real time. First use the sampling period T s The speed controller performs speed signal detection and transmission, and at the same time uses the sampling period T c The current controller detects and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More