

Control device for moving robot based on blue-tooth technology
A technology for mobile robots and control devices, which is applied in electrical program control, program control manipulators, program control in sequence/logic controllers, etc., to achieve the effects of simple peripheral circuits, fast response speed, and fast computing processing capabilities.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
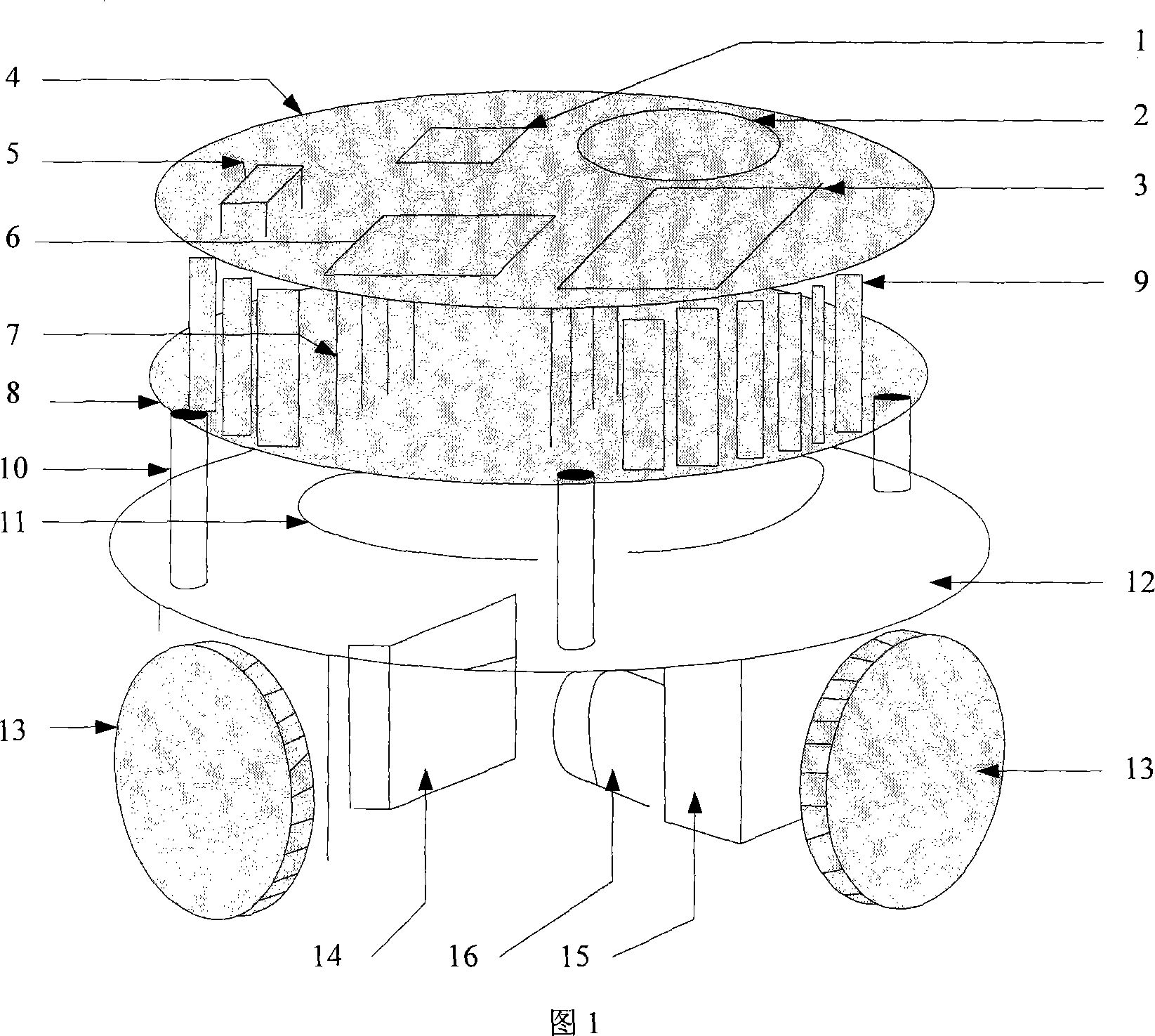
[0024] The robot adopts four-wheel omni-directional drive, adopts plate-column structure, and is divided into three layers: control board, driving board, and body chassis. 1 in Figure 1 is the core control unit DSP chip; 2 is the power supply unit, including 5V, 3.3V; 3 is the attitude sensor unit, including gyroscope and acceleration chip; 4 is the robot control board; 5 is the Bluetooth module; 6 is CPLD ; 7 is the data interaction bridge between the control board and the driving board; 8 is the driving board; 9 is the power switch tube MOSFET, a total of 4 groups of 24; 10 is the pillar; 11 is the adapter board; 12 is the robot chassis; 13 is the omnidirectional wheel , a total of 4 pieces; 14 is 8.4V lithium batteries, a total of 3 pieces; 15 is a motor bracket, which is integrated with the chassis; 16 is a brushless DC motor with a gearbox, a total of 4 pieces.
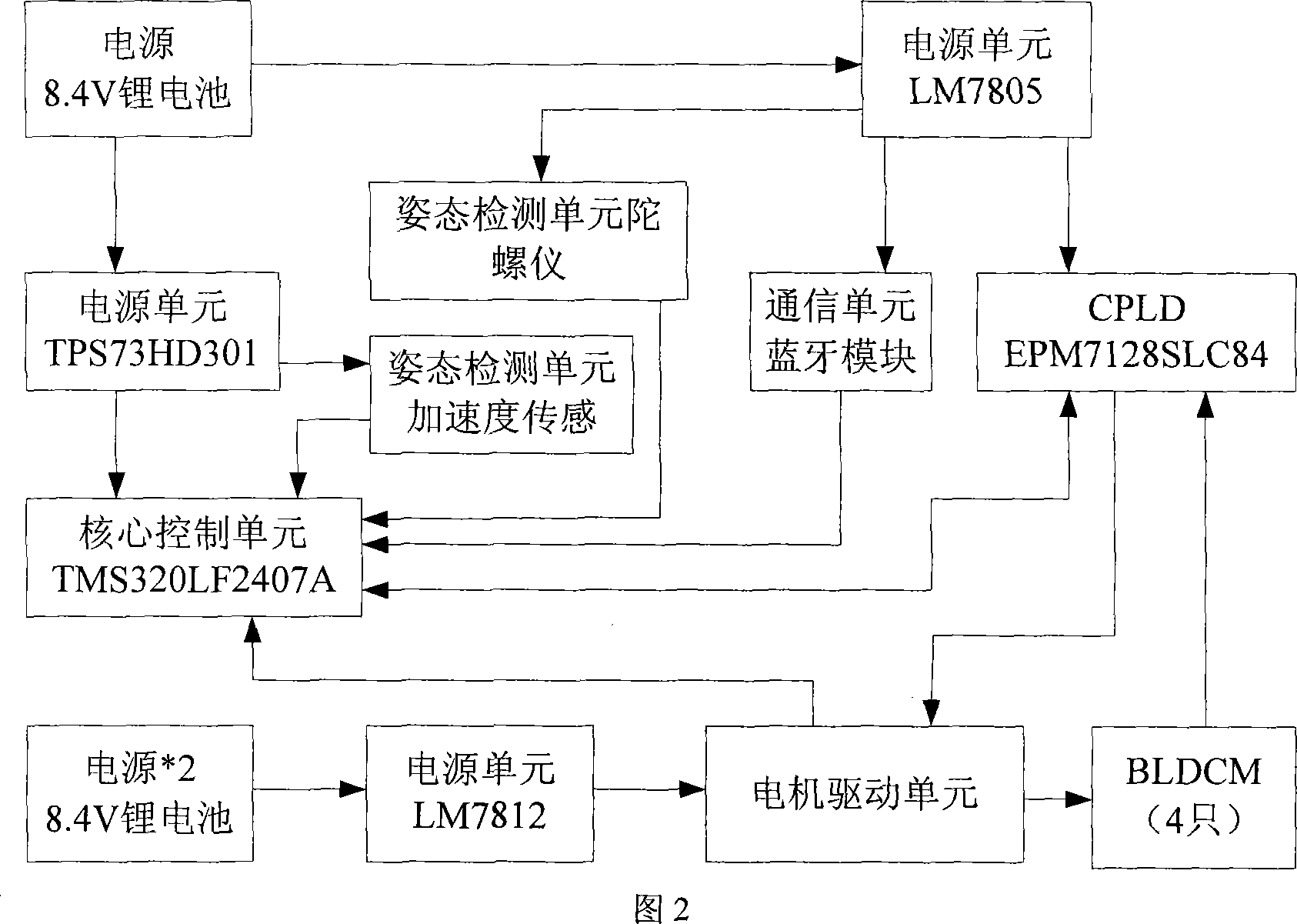
[0025] The invention mainly includes six major blocks: a power supply unit, a communication unit, a motor driv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More