

Real-time simulation system for under-driven double-feet walking robot
A walking robot and real-time simulation technology, applied in the system field of the simulation technology field, can solve the problems of no function, no system, etc., and achieve the effect of complete functions, convenient operation, and convenient modification
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0051] This embodiment is used for real-time control of an underactuated biped walking robot and debugging of a control algorithm, and the involved components include a physical robot and a real-time control module.
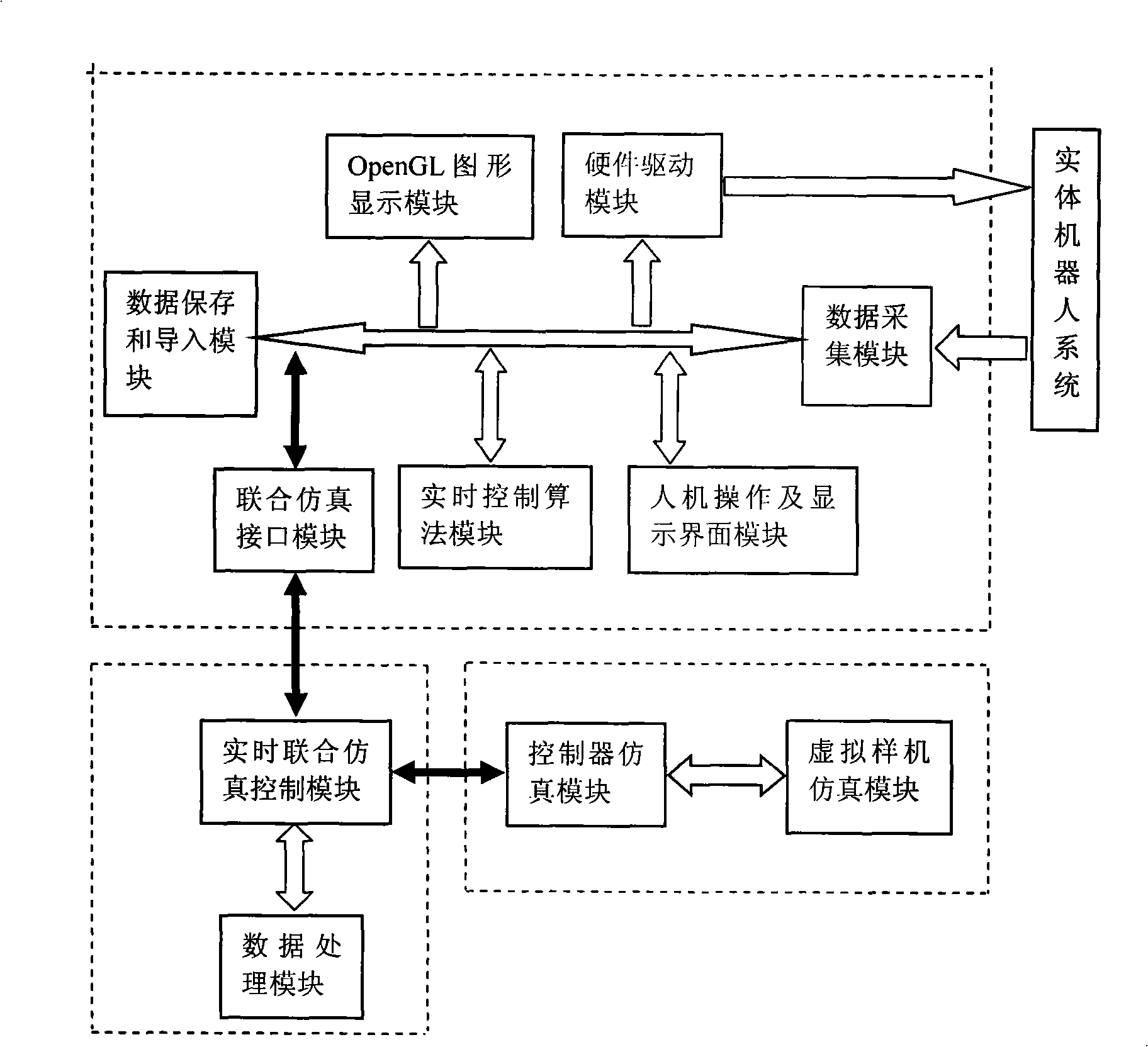
[0052] In this embodiment, the underactuated biped walking robot simulation system uses a real-time control module to complete the real-time control of the robot, and the system structure diagram for realizing real-time control is shown in Figure 4 shown.
[0053] In the control and debugging experiment of the physical underactuated robot, the test mainly carries out the design of the control algorithm and the analysis of the test data. The modification and addition of the algorithm bring convenience to the analysis. The modification method is to open the development code of the real-time control platform on the VC software platform, and to Add or modify the control algorithm in the real-time control algorithm module, compile the code, get the real-time control ...
Embodiment 2
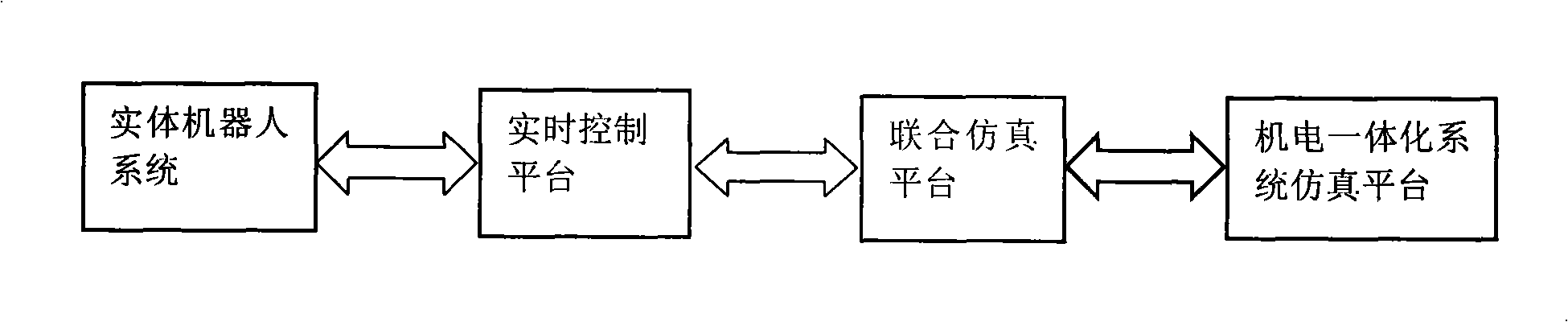
[0061] This embodiment is used for the joint simulation analysis of the underactuated biped walking robot. The components involved include a real-time control platform, a co-simulation platform, and a mechatronics system simulation platform.
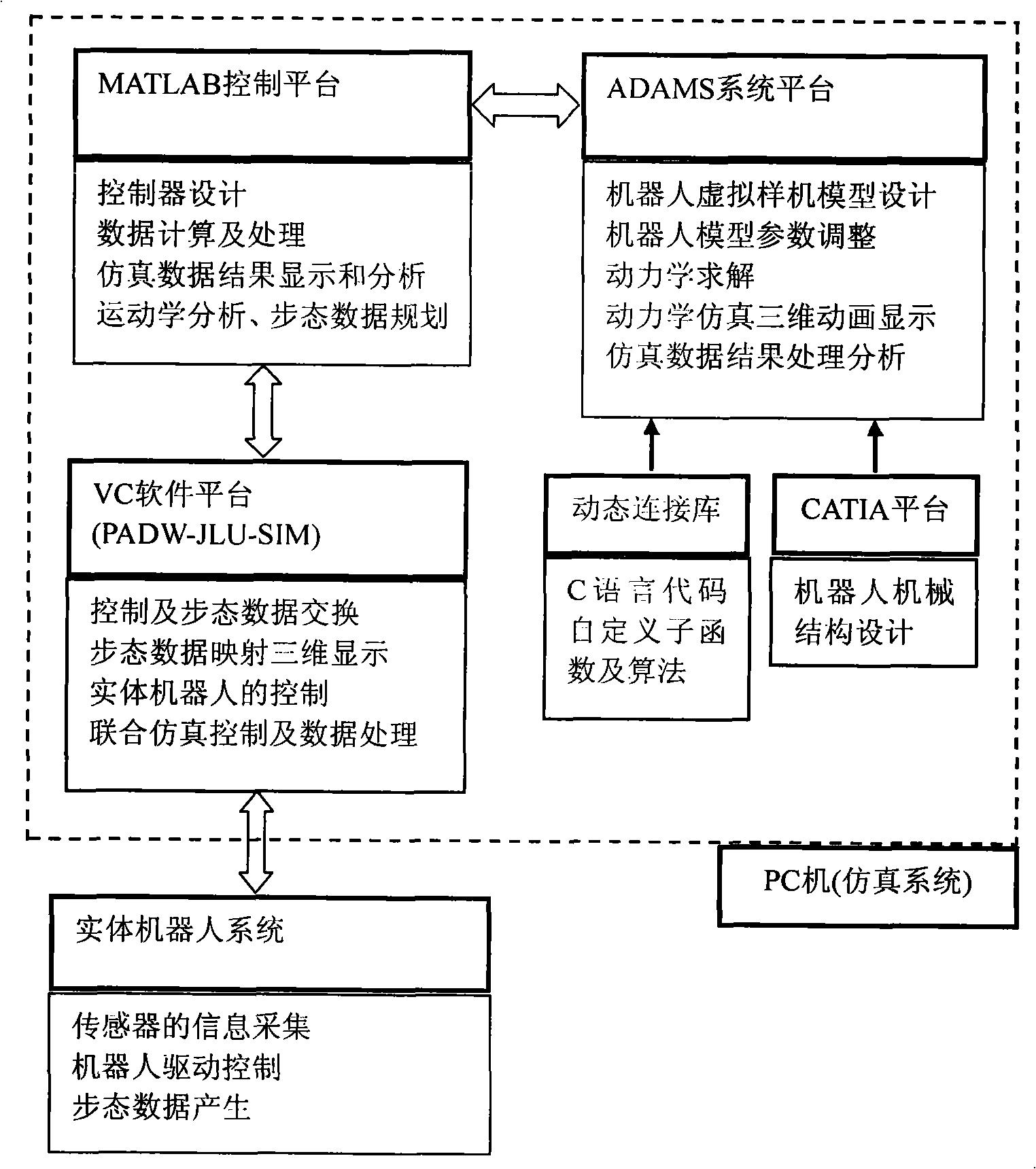
[0062] Using the controller simulation module, the kinematics-dynamic modeling and numerical simulation of the underactuated biped walking robot with knee joints are carried out, and the posture restoration algorithm is used to reconstruct the kinematics process of the robot's walking. The solver is the calculation core of the simulation software. It is responsible for solving the dynamic equation of the robot’s walking to obtain the gait data of the robot. The computer communication interface is used to realize the two-way communication and control connection with the robot prototype. The man-machine interface is responsible for receiving the simulation parameters. Set up, and transmit parameters and control commands to the background m...
Embodiment 3
[0068] This embodiment is used for the joint simulation analysis of the underactuated biped walking robot. The components involved include a co-simulation platform and a mechatronics system simulation platform.
[0069]In the virtual prototype simulation module of the mechatronics system simulation platform, the parameters of the robot virtual prototype model are matched and adjusted, and the controller is designed in the controller simulation module. The forms of the controller are various, and the output of the controller is calculated by the algorithm. , forming a closed-loop control, but it can also be the gait data directly imported by the controller, which is an open-loop control. During co-simulation, the controller simulation module and the virtual prototype simulation module work at the same time, and there is real-time data transmission between them, and the dynamic solution and controller response output are completed collaboratively. Co-simulation is carried out t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More