

Method for controlling random vibration of electrohydraulic servo system
An electro-hydraulic servo system and algorithm technology, applied in fluid pressure actuation system components, mechanical equipment, fluid pressure actuation devices, etc., can solve the quantitative assessment affecting the reliability of the tested product, cannot guarantee the convergence of the iterative algorithm, Reduce the power spectral density reproduction accuracy and other problems to achieve the effect of easy computer digital control, enhanced authenticity, and ensured convergence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
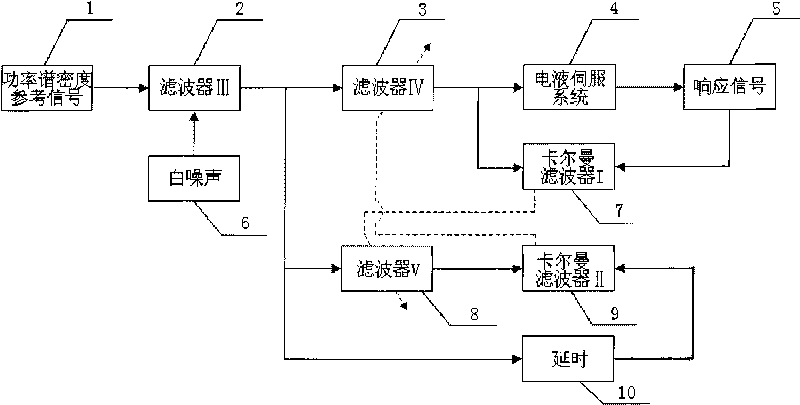
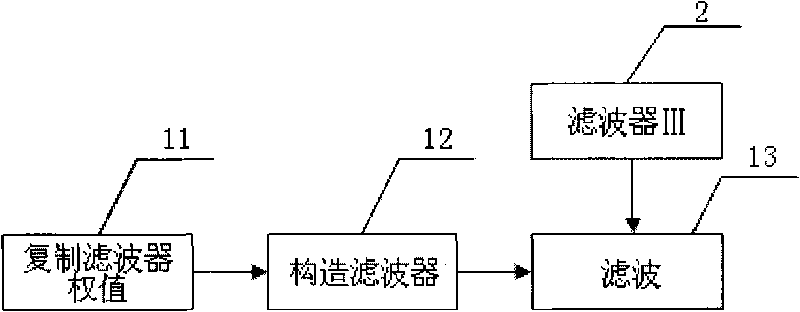
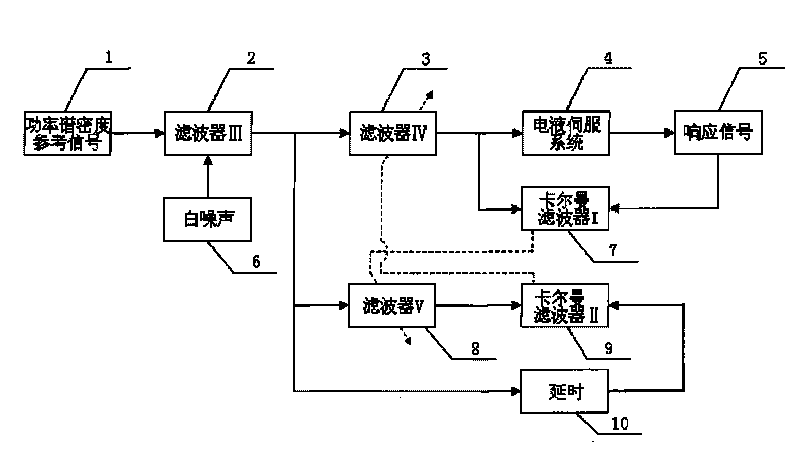
[0033] The present invention will be further described below in conjunction with the accompanying drawings. Such as Figure 1-2 As shown, a random vibration control method of an electro-hydraulic servo system includes the following steps:
[0034] A. Set the acceleration power spectral density signal to be reproduced as the acceleration power spectral density reference signal 1;
[0035] B. Design filter III2 with acceleration power spectral density reference signal 1;
[0036] C, utilize white noise signal 6 generators to generate acceleration white noise signal 6;
[0037] D, calculate the acceleration output signal of the acceleration white noise signal 6 after filter III2 filtering, and use the acceleration output signal as the acceleration time domain drive signal corresponding to the acceleration power spectral density reference signal 1;
[0038] E, take the acceleration input signal of the electro-hydraulic servo system 4 as the acceleration input signal of the Kalm...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More