

Magnetic-navigation motion control system for use in capsule endoscopy
A technology of motion control system and capsule endoscope, applied in the direction of endoscope, in-body radio detector, application, etc., can solve the problems of long detection cycle, intestinal damage, and unpredictable potential harm of human body, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention is described in more detail below by means of examples, but the following examples are only illustrative, and the protection scope of the present invention is not limited by these examples.
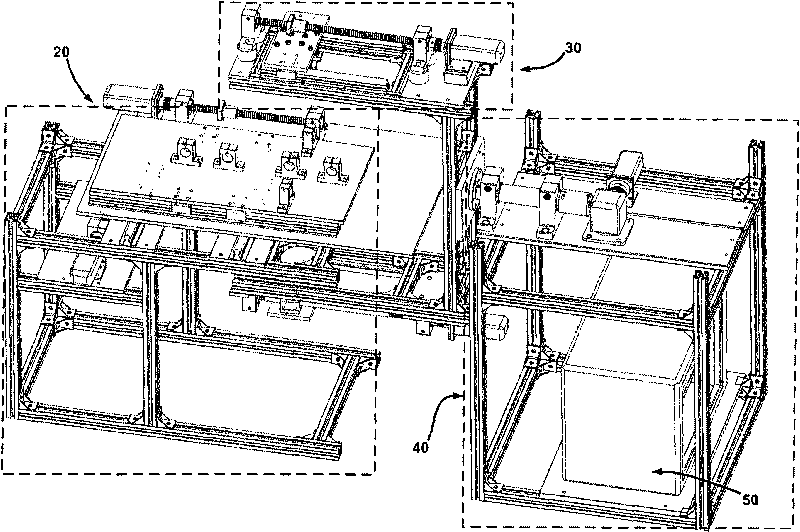
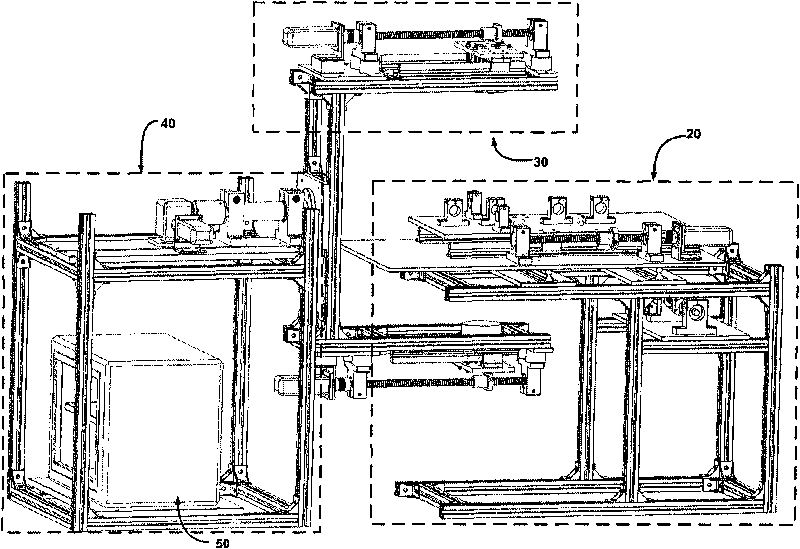
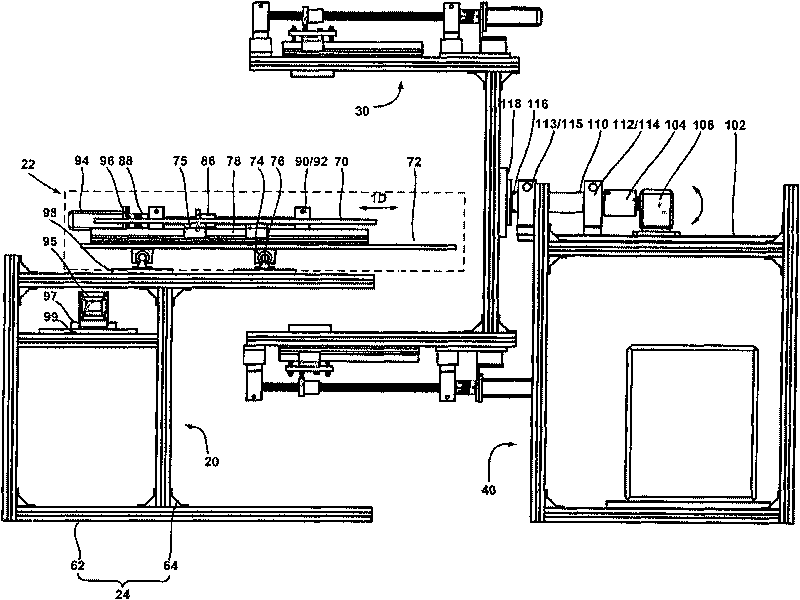
[0028] Such as figure 1 and figure 2 As shown, a capsule endoscope magnetic navigation motion control system according to an embodiment of the present invention includes a subject support part 20 , a magnetic assembly 30 , a magnetic support base 40 , and a servo control unit 50 . The magnetic assembly 30 and the magnetic support base 40 are connected through the connecting plate 118 and the flange bushing 116, the subject support part 20 is not connected with the magnetic assembly 30 and the magnetic support base 40, and the servo control unit 50 is placed on the magnetic support base 40 Above, the servo control unit 50 controls the operation of the servo motors of the subject support part 20 , the magnetic assembly 30 and the magnetic support base 40 .
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More