

Fuzzy fusion identification method of rotating speed of sensorless motor
A speed sensorless and identification method technology, applied in the field of fuzzy fusion identification of speed sensorless motor speed, can solve problems such as poor real-time performance, speed estimation convergence error, difficulty in determining the number of hidden layer nodes in the network, etc., and achieves strong dynamic tracking performance. High speed identification accuracy and effective control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
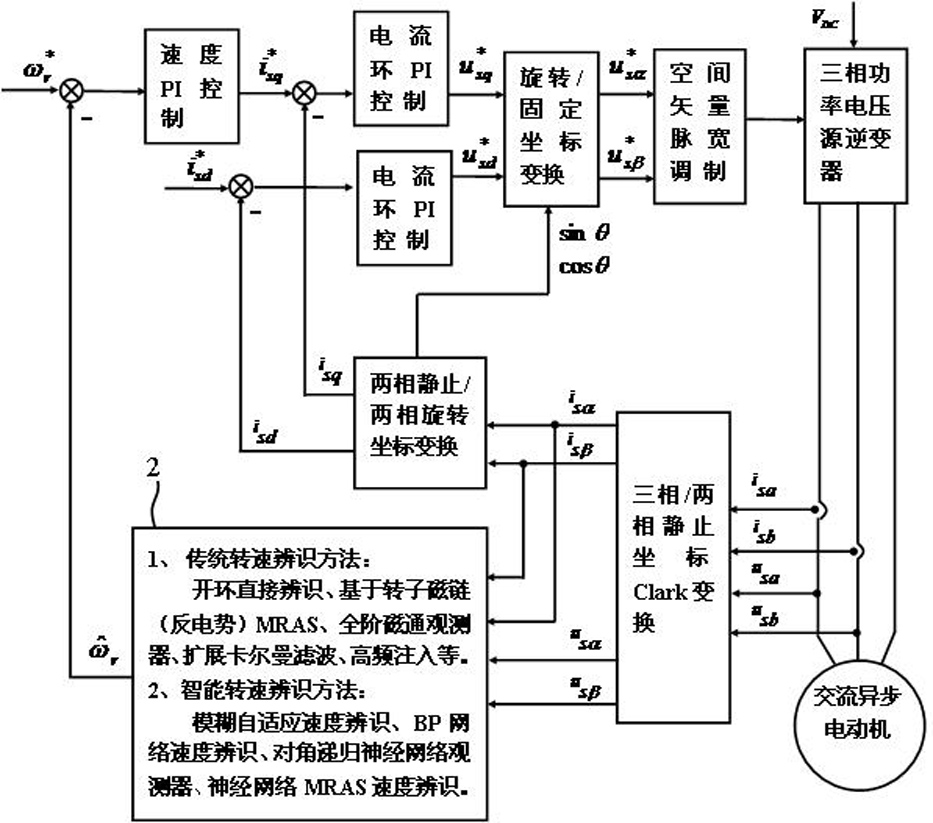
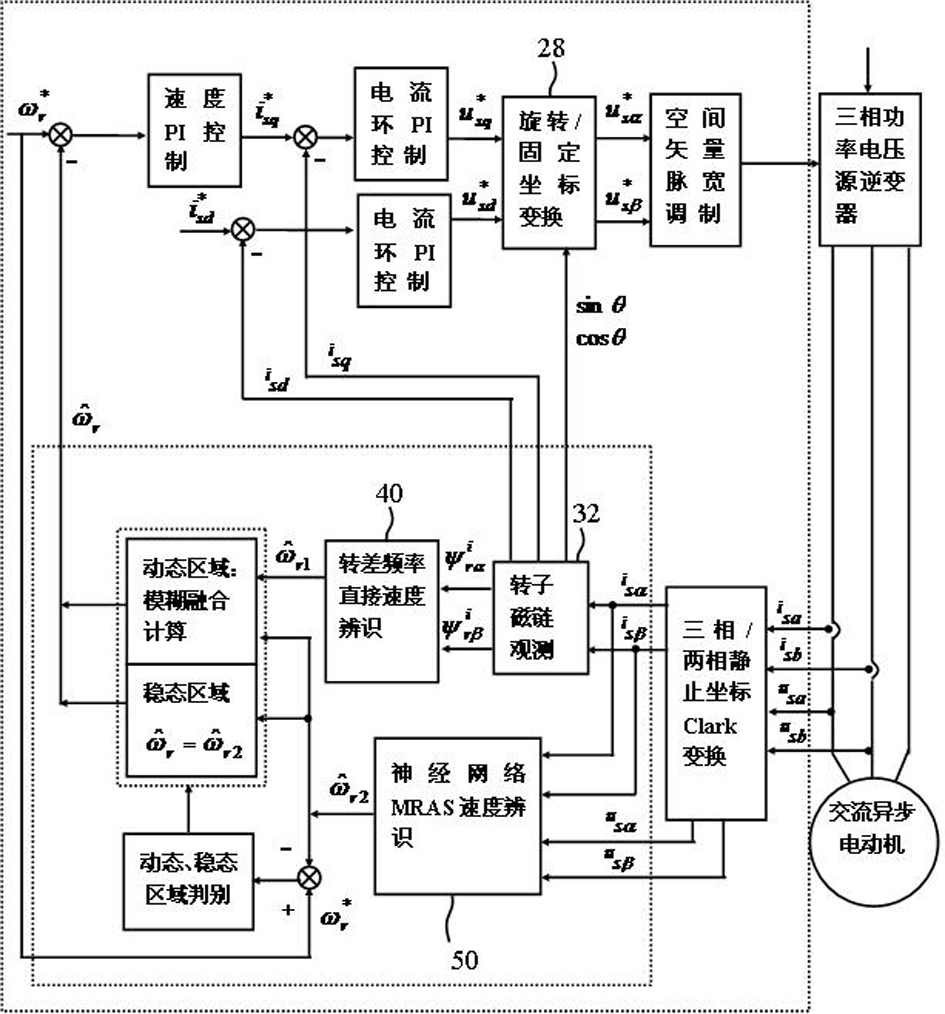
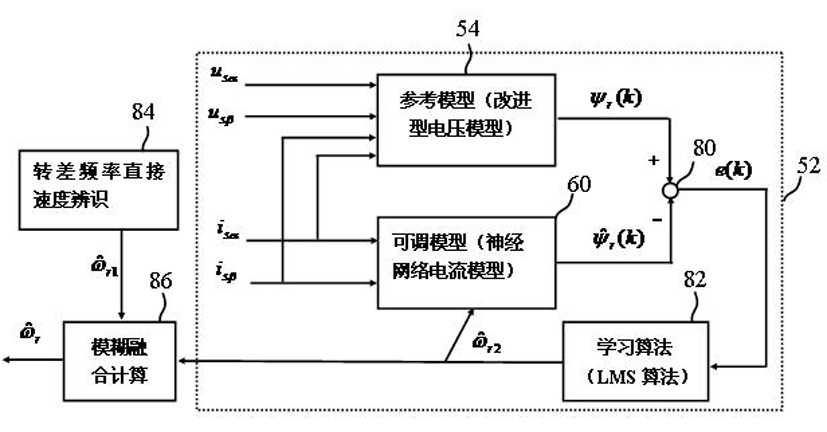
[0036] Proceeding from the problem of "background technology", the inventor, after painstaking research, found that the neural network MRAS speed identification method has the following characteristics: the convergence speed is slow, and the speed fluctuates greatly in dynamic stages such as motor starting and speed change, and even negative fluctuations occur. The number of oscillations is large, the real-time performance is poor, and even the speed estimation converges to an error value; while the neural network needs to continuously learn and adjust the weights, and has a strong self-regulation ability. It is relatively stable in the steady-state stage with small errors. High precision and strong robustness.
[0037] At the same time, the inventor also found that the existing slip frequency direct speed identification method is a simple, direct and effective method with less computation, no delay, good dynamics, and can greatly improve the rapidity of speed identification. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More