

Construction method of five-degree-of-freedom alternating-current active magnetic bearing alpha-ordered invertible system decoupling controller
A technology of active magnetic bearings and decoupling controllers, applied in the direction of bearings, bearing components, shafts and bearings, etc., can solve the problems of inability to achieve dynamic decoupling of the system, difficulty in optimizing the network structure, difficulty in sample extraction, etc., and achieve good load resistance Disturbance ability, clear and intuitive physical concepts, simple and clear mathematical analysis
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
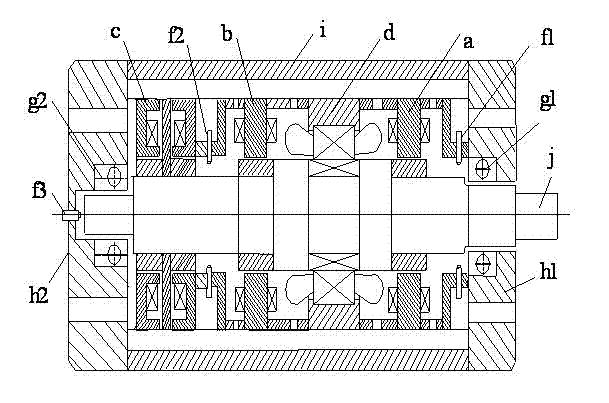
[0019] Such as figure 1 , the five-degree-of-freedom AC active magnetic bearing 1 is composed of two radial active magnetic bearings a and b, one axial active magnetic bearing c and a high-speed motor d, two radial active magnetic bearings a, b, and one axial Both the active magnetic bearing c and the high-speed motor d are installed in the sleeve i; two radial active magnetic bearings a, b, one axial active magnetic bearing c and the high-speed motor d share a rotating shaft j, and the two ends of the rotating shaft j are respectively controlled by Auxiliary bearing g1, g2 support. Auxiliary bearings g1 and g2 are respectively fixed on end covers h1 and h2. The radial displacement sensor f1 is fixed on the sensor bracket on the right side of the radial active magnetic bearing a, and the radial displacement sensor f2 is fixed on the sensor bracket on the left side of the radial active magnetic bearing b to measure the radial displacement of the rotor. The axial displacement ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More