

Position and attitude measurement method based on time of flight (TOF) scanning-free three-dimensional imaging
A 3D imaging and pose measurement technology, applied in the field of 3D vision target pose measurement, can solve the problem that the rigid conditions of pose calculation cannot be guaranteed, the calculation result has large errors, and the convergence and speed of iterative solutions affect the real-time performance of the measurement. issues of accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
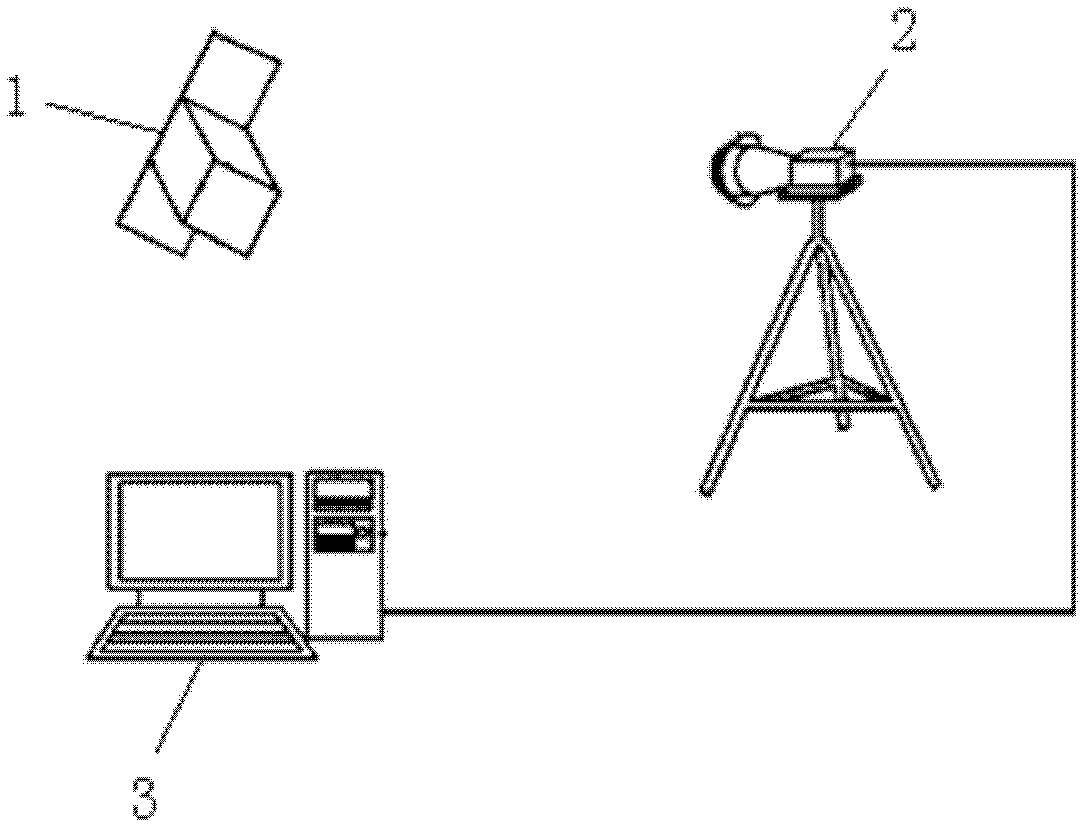
[0042] see figure 1 , the system structure of this embodiment includes a target object 1 , a TOF camera 2 and a data processing system 3 .
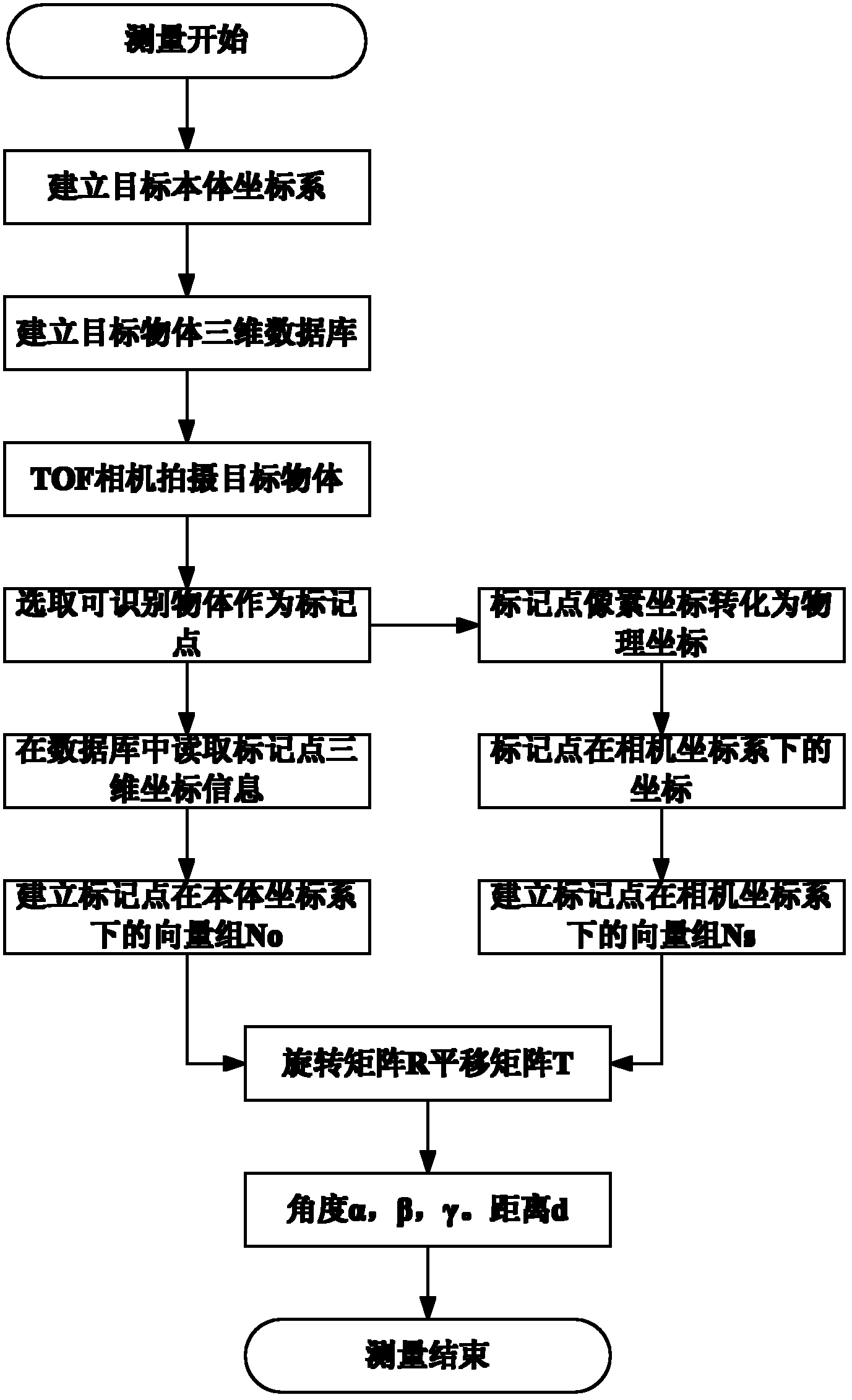
[0043] see figure 2, the workflow of the pose measurement method based on TOF scanless three-dimensional imaging in this embodiment is:
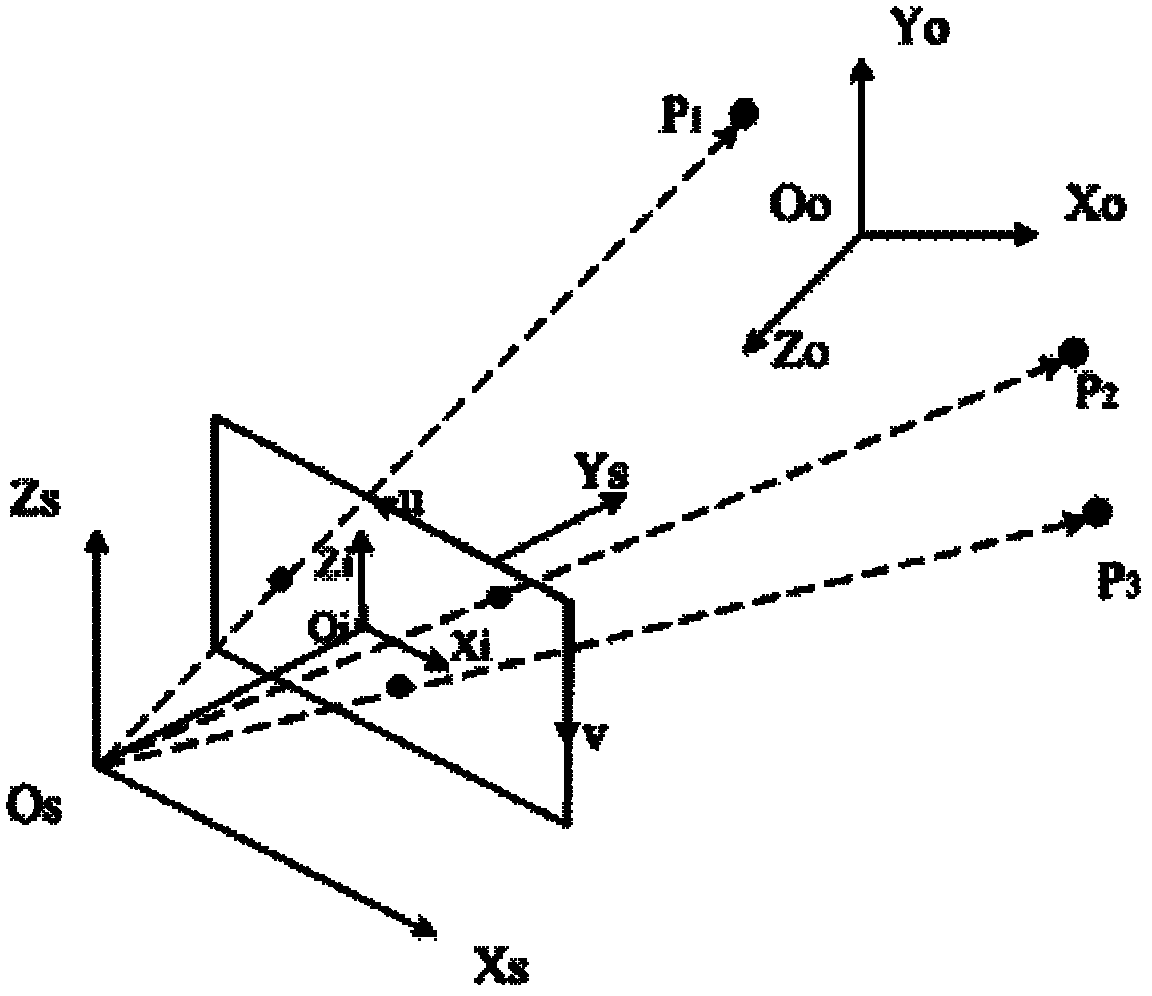
[0044] 1) Shoot the target object through the TOF camera, and select three identifiable objects in the imaging image of the target object as marker points P i , i=1, 2, 3, and obtain the marker point P from the pre-established 3D coordinate information database of the target object i Coordinate P in the target body coordinate system i =(X i , Y i ,Z i ), i=1, 2, 3, find two linearly independent unit column vectors by connecting any two marked points and make for The formed unit column vector, constructs three marked points P i The vector group in the target body coordinate system: n o = ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More