

Field bus-based PAC (Programmable Automation Controller) industrial robot control system
An industrial robot, field bus technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of driver influence, inconvenient installation and maintenance, unreasonable structure, etc., to overcome unreasonable structure, easy installation and maintenance. , the effect of reasonable structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The preferred embodiments of the present invention will be described below in conjunction with the accompanying drawings. It should be understood that the preferred embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
[0041] According to an embodiment of the present invention, a PAC industrial robot control system based on a field bus is provided, and the system can apply industrial robots and / or automatic control equipment including industrial robots.
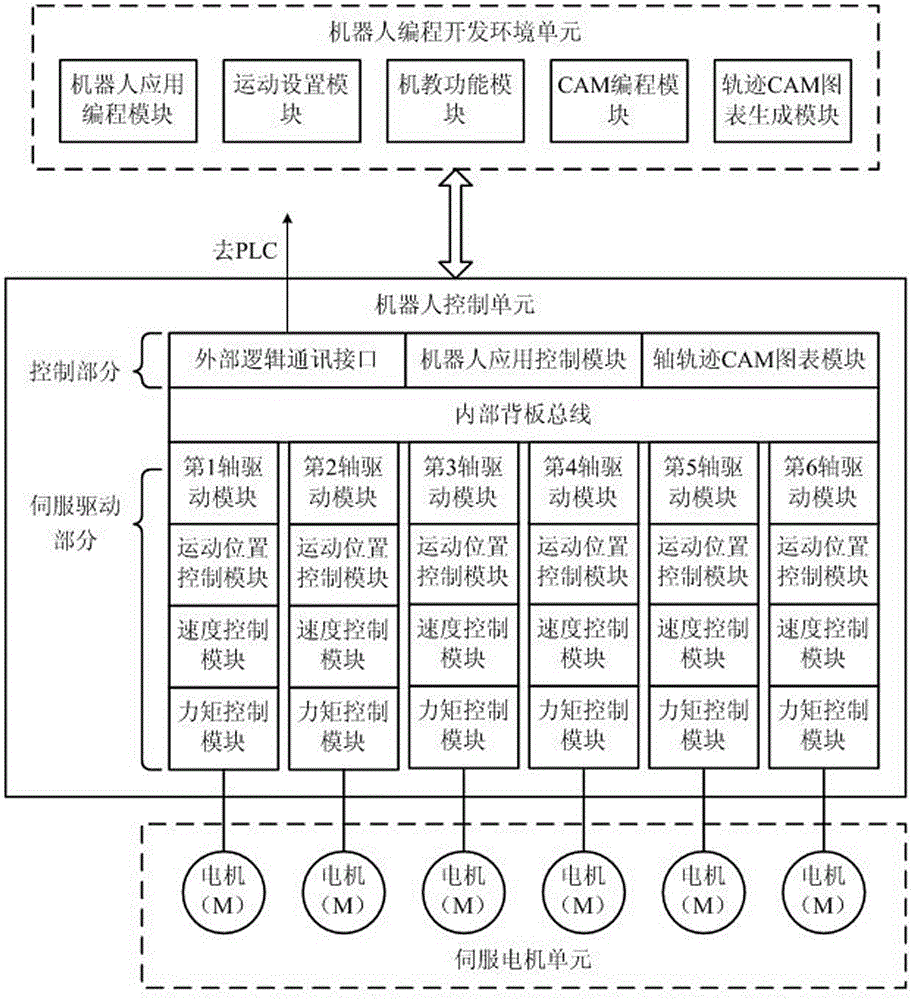
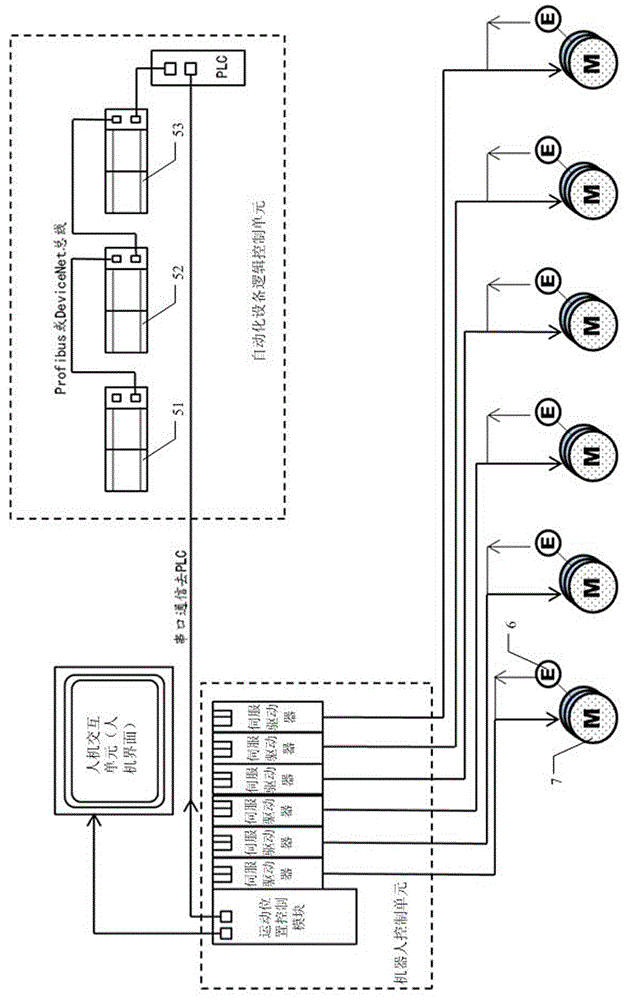
[0042] Such as Figure 4 and Figure 5 As shown, this embodiment includes a robot shaft servo control unit for controlling and driving the shaft joints of each mechanical arm of an industrial robot, a high-speed real-time Ethernet field bus, and a human-computer interaction unit for controlling the servo control of the robot shafts respectively. The PAC controller is controlled by the robot axis servo control unit and the human-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More