

Track generating method facing toward complex curved surface processing and track generating system thereof
A complex surface and trajectory generation technology, applied in general control systems, control/regulation systems, instruments, etc., can solve problems such as difficult hardware architecture design, low search efficiency, and large amount of computation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
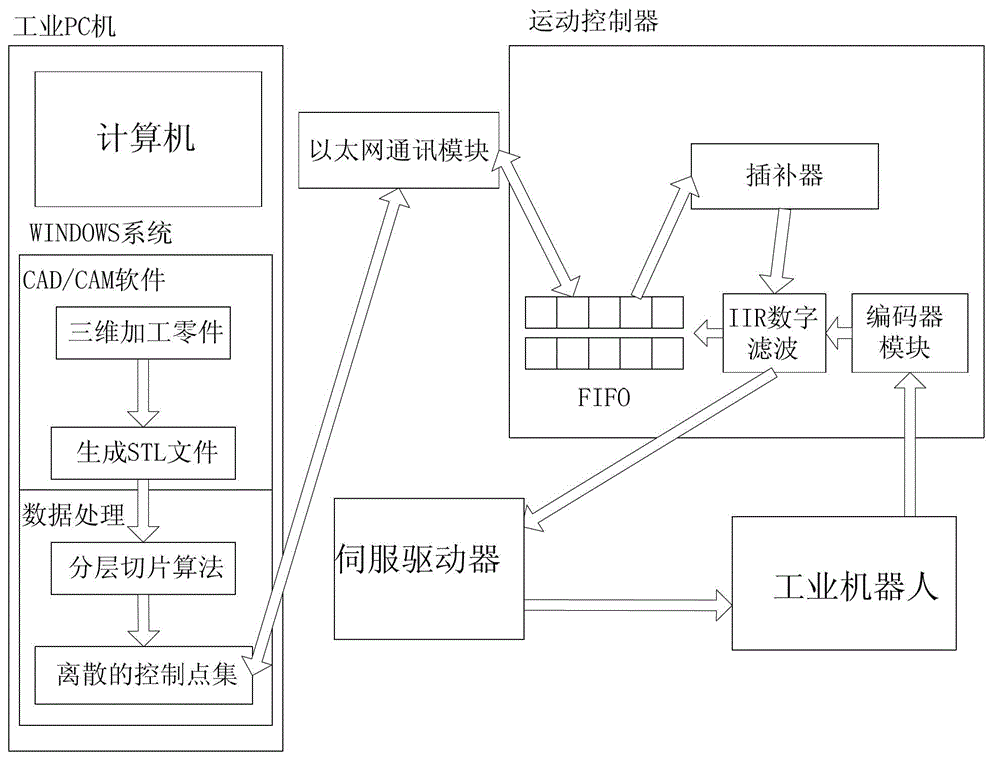
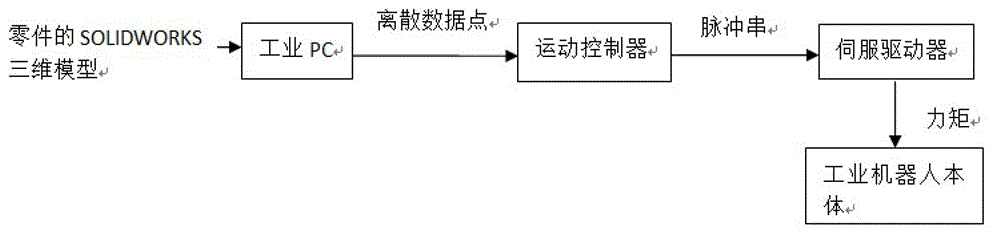
[0062] like figure 1 As shown, a trajectory generation system for complex surface processing, including industrial PC, motion controller, servo drive and industrial robot body. At the same time, if figure 2 As shown, the industrial PC uses the layered slicing algorithm based on the STL model to generate a discrete set of control points for the three-dimensional parts to be processed and then transmits it to the motion controller through the Ethernet communication module. Perform interpolation calculations, and then output pulse trains to the servo drive to drive the industrial robot body for coordinated motion in torque control mode.
[0063] The motion controller includes hardware circuits such as integrated soft core, Ethernet interface, interpolator, encoder module, IIR digital filter, FIFO buffer module, system interrupt, etc. Download discrete data points to the FIFO buffer module for buffer storage; the interpolator is used to perform linear interpolation calculations...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More