

Base band time difference estimating method under off-site local oscillator conformity error
A technology of time difference estimation and error estimation, which is applied in the field of time difference high-precision measurement, can solve problems such as oscillator consistency error, influence time difference estimation results, and fail to meet engineering needs, and achieve the effect of improving performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0038] 1. In the radiation source location, baseband time difference estimation is analyzed, and the influence of frequency and phase consistency errors between local oscillators in different places on the time difference relationship is analyzed, and the radiation source signal under the existence of consistency errors in different places local oscillators is obtained. The signal time difference relationship model after frequency conversion to baseband is as follows:
[0039]
[0040] Expressed in a digital baseband system as:
[0041]
[0042] here x i [n]=x i (nT δ ),i=1,2,T δ is the time interval between adjacent sample points in the baseband;
[0043] 2. According to the baseband signal time difference relationship model under the existence of local oscillator consistency error, a three-dimensional search maximum likelihood time difference estimation method based on the principle of maximum relief estimation is given.
[0044] Three-dimensional search maximum l...
Embodiment 2
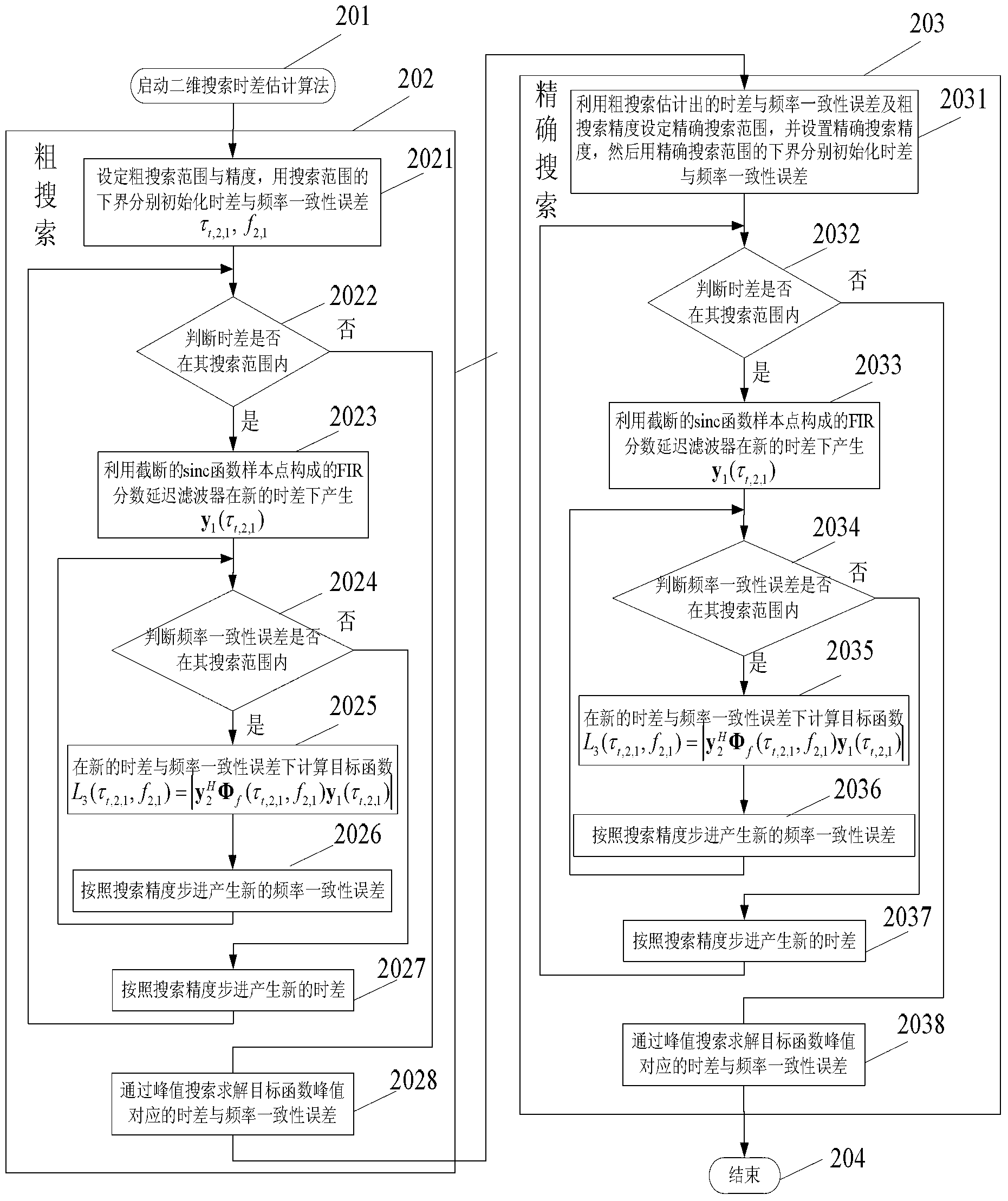
[0068] Since the given maximum likelihood time difference estimation method requires a three-dimensional search with high computational complexity, which is not conducive to engineering implementation, a two-dimensional search after dimensionality reduction is given to realize time difference estimation:
[0069] pair matrix Decompose to get the matrix Φ f (f 2,1 ,τ t,2,1 )as well as
[0070]
[0071]
[0072] I represents the identity matrix whose diagonal elements are all 1s. So similar to the time delay estimation of the correlation method, we can get the objective function L 2 :
[0073]
[0074]
[0075] = | y 2 H Φ f ( τ t , 2,1 , f 2,1 ) y ...
Embodiment 3
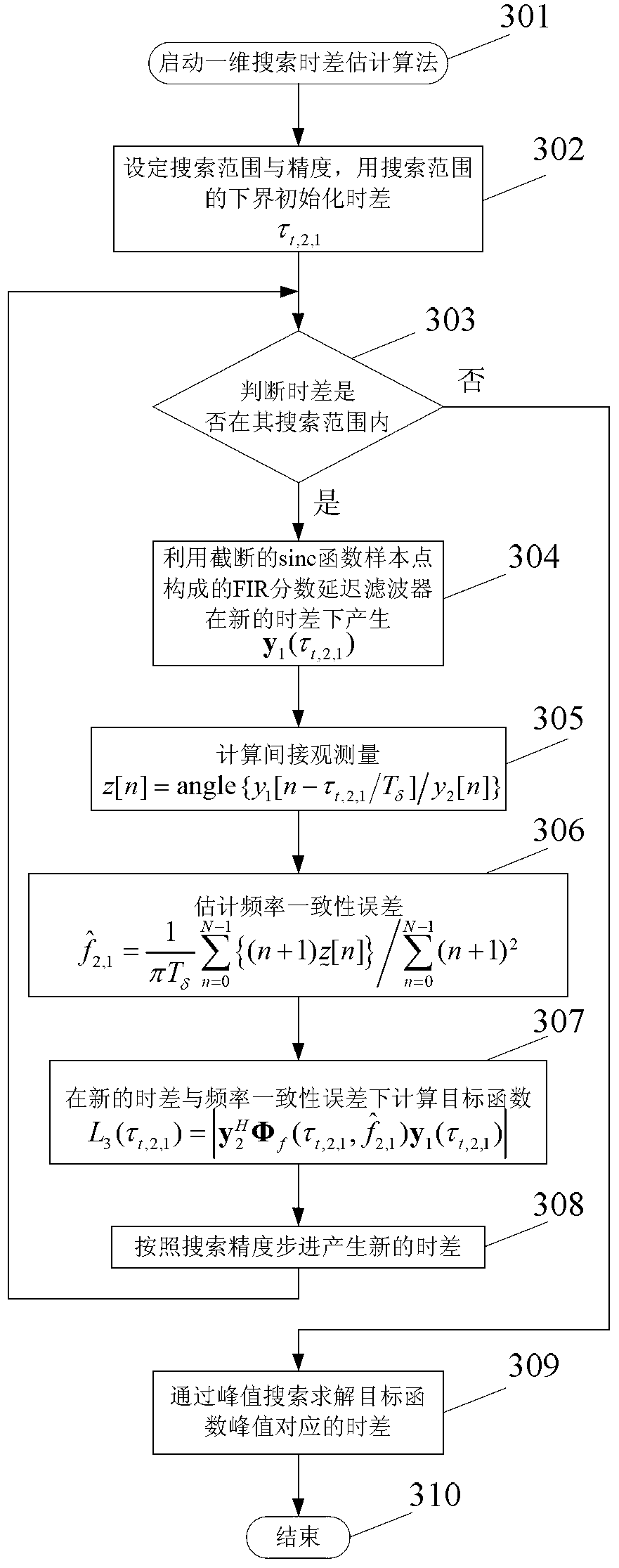
[0104] The above problem of transforming the three-dimensional search into a two-dimensional search to realize the time difference estimation greatly reduces the amount of computation. If it is necessary to compress the amount of computation to improve the estimation speed, this embodiment proposes to further reduce the dimensionality of the two-dimensional search into a one-dimensional search Methods:
[0105] Without considering the noise, it can be known from the previous derivation:
[0106]
[0107] Considering the influence of noise, the approximate expression is as follows:
[0108]
[0109] The right side of the above equation can be directly calculated by using the observation data. For the convenience of description below, it is called indirect observation data here. This equation constitutes a linear regression model, and the unknown frequency consistency error f 2,1 is the model parameter to be estimated, which can be estimated by the least square method as...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More