

High-power built-in permanent magnet synchronous motor position-sensorless control system and control method
A permanent magnet synchronous motor, built-in technology, applied in the direction of control system, vector control system, motor generator control, etc., can solve the problem of increasing low-order harmonic components
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
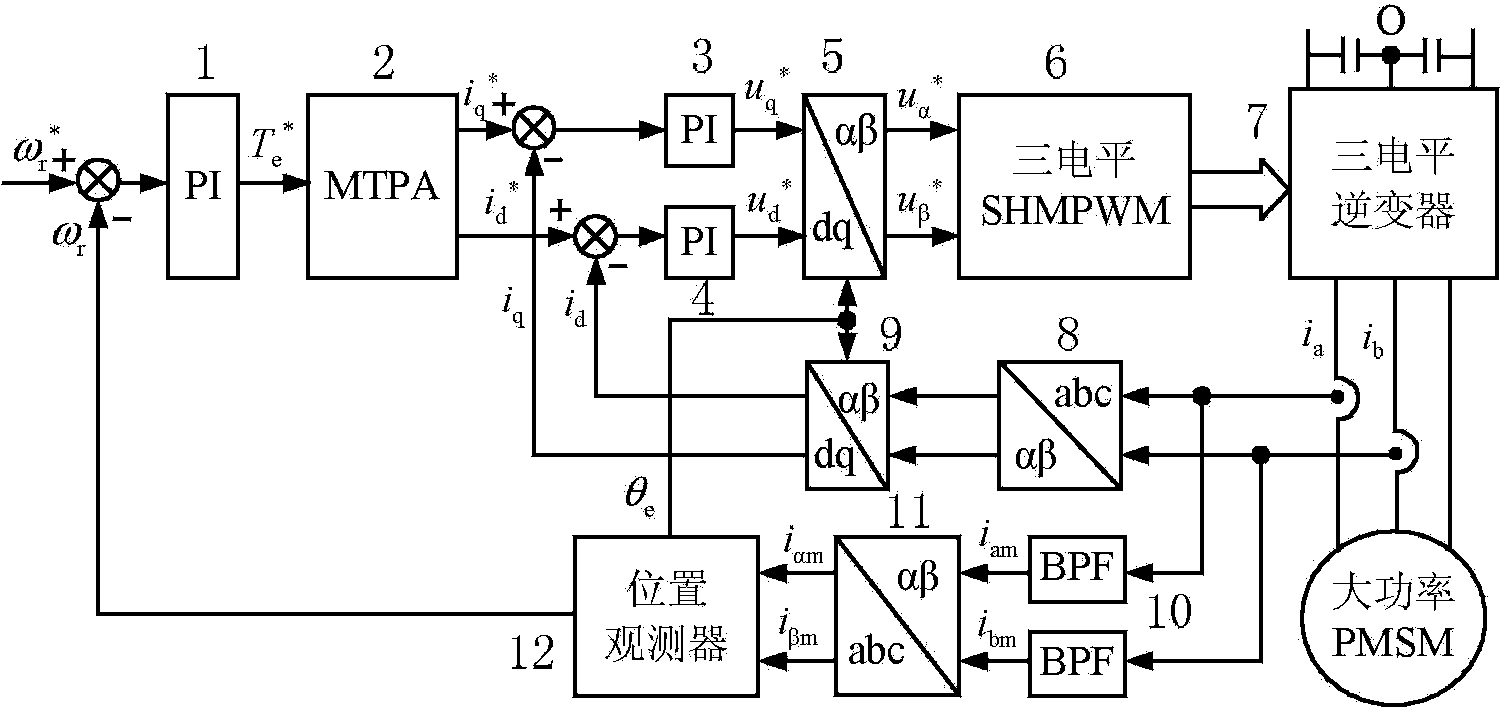
[0034] Specific implementation mode 1, refer to figure 1 and figure 2Specifically explain this embodiment, a high-power built-in permanent magnet synchronous motor position sensorless control system described in this embodiment, the system includes No. 1 PI calculation unit 1, used for angular velocity and rotor feedback angular velocity ω r Perform PI operation on the difference to get the given torque
[0035] MTPA maximum torque / amp unit 2 for the given torque on the Carry out the calculation of the maximum torque-current ratio, and obtain the d and q-axis current given values
[0036] The second PI calculation unit 3 is used to set the q-axis current value and q-axis current feedback value i q Perform PI operation on the difference to get the given value of q-axis voltage
[0037] No. 3 PI calculation unit 4, used to set the d-axis current value and the d-axis current feedback value i d Perform PI operation on the difference to get the d-axis voltage giv...
specific Embodiment approach 2
[0044] Specific Embodiment 2. A position sensorless control method of a high-power built-in permanent magnet synchronous motor position sensorless control system described in this specific embodiment, the method includes the following steps:
[0045] Step 1. Angular velocity and rotor feedback angular velocity ω r Make the difference, and perform PI operation on the difference to get the given torque
[0046] Step two, for the given torque Carry out MTPA maximum torque-current ratio calculation to obtain d and q-axis current given values
[0047] Step 3. Set value of q-axis current and q-axis current feedback value i q Perform PI operation on the difference to get the given value of q-axis voltage Given value for d-axis current and the d-axis current feedback value i d Perform PI operation on the difference to get the d-axis voltage given value
[0048] Step 4, set the q-axis voltage to a given value d-axis voltage given value and rotor position informat...
specific Embodiment approach 3
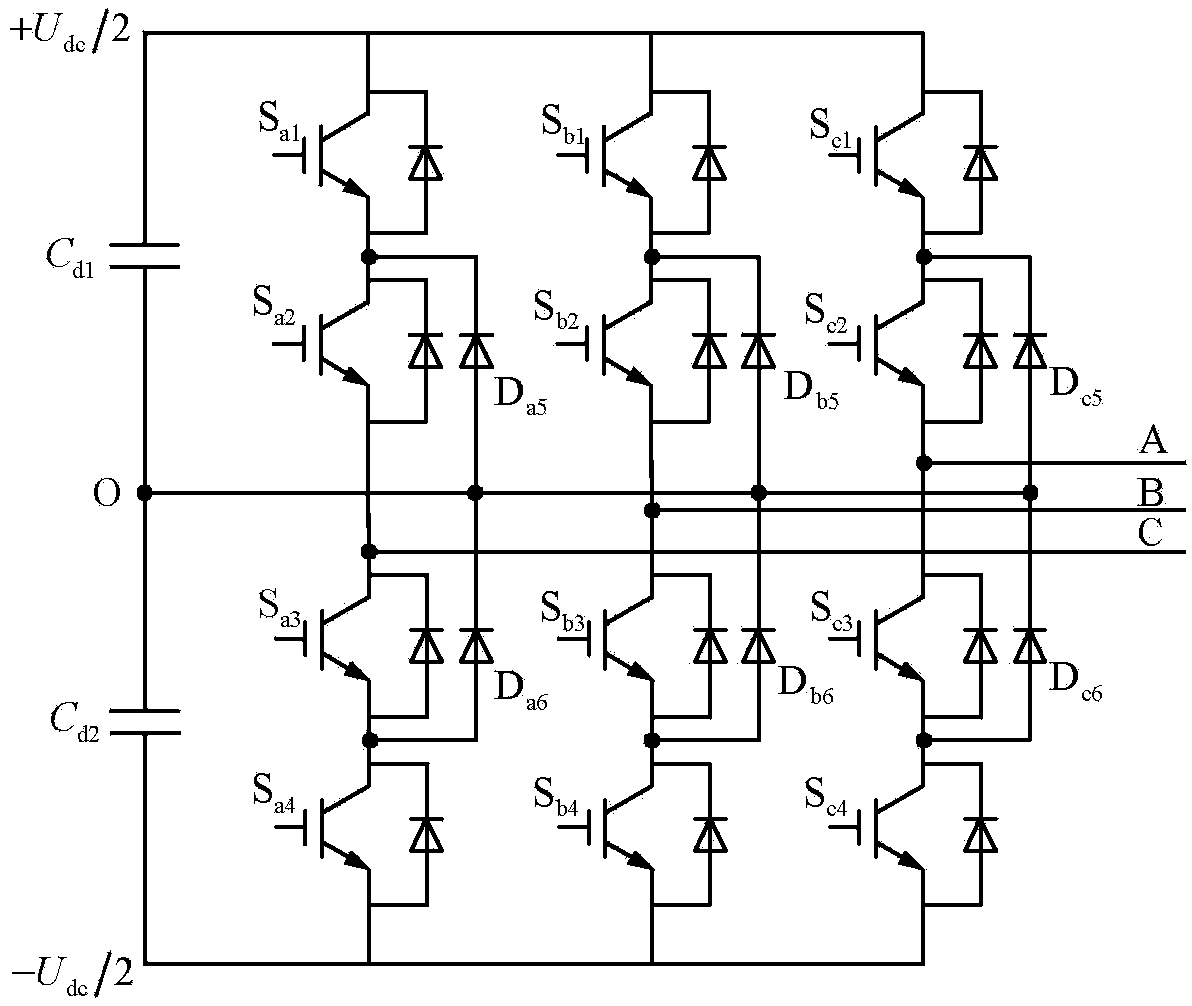
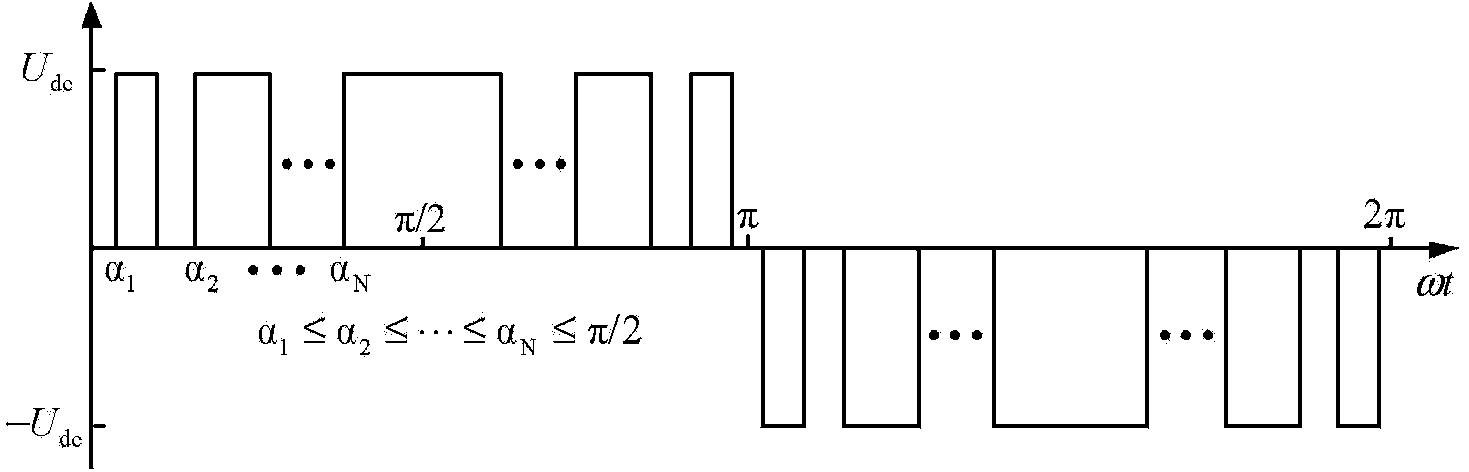
[0055] Specific implementation mode three, refer to image 3 and Figure 4 Describe this embodiment in detail. This embodiment is a further description of the position sensorless control method for a high-power built-in permanent magnet synchronous motor described in the second specific embodiment. In this embodiment, according to the α-axis given voltage and beta axis given voltage Obtain the modulation ratio, carry out the three-level SHMPWM operation, and then generate the process of the pulse width signal of the power device and the step 6 according to the power device pulse width signal through the three-level inverter unit output with constant amplitude, The mth harmonic voltage vector u with a phase difference of 120° am , u bm , u cm The acquisition process of the three-phase three-level voltage signal is as follows:
[0056] Step 11, assuming that there are N conversion angles in [0, π / 2] cycles, a i (i=1,2,3,...,N) is the conversion angle, according to the F...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More