Although foreign mobile communication equipment has the advantages of reliable quality and stable performance, there are several unavoidable problems: (1) The technical solution generally adopts the traditional stability control scheme, and the
system uses relatively high-cost inertial devices. The control accuracy is completely dependent on the accuracy of the inertial device. Generally,
optical fiber or
laser inertial navigation system needs to be selected, and the cost of the
system is difficult to control; at the same time, due to the import tariff and the intermediate profit of the agent, the purchase price of the user is often high. It is difficult for users to bear its sales price, so it cannot be widely used; (2) Foreign products involve imports, and the delivery time and quantity of products cannot be guaranteed. At the same time, product
technical support and after-sales service cannot be obtained. Timely guarantee, especially the technical transformation related to the characteristics of users, generally cannot be completed, thus limiting the promotion; (3) Some countries prohibit or
restrict the import of main antennas to China, especially some high-performance antennas involving military applications, such as KU, KA dual-band antennas, KA antennas, etc. are restricted for export; (4) Antennas in motion are generally used in government,
public security, armed police, military and other emergency communication fields, which have very strict requirements on the
confidentiality of communication systems, and The
confidentiality of imported products from abroad cannot be guaranteed and controlled at all; (5) imported mobile communication antennas generally use
GPS positioning systems and are not equipped with Beidou navigation and positioning systems, which makes the system unusable in
emergency situationsHowever, judging from the current domestic development of mobile communication antennas, there are mainly the following problems: (1) The mobile communication antenna systems developed by these research institutes are mainly for government and military departments that are relatively insensitive to prices , the cost of the system has not been effectively controlled. At the same time, due to the relatively conservative technical solutions, all of which are traditional high-precision inertial navigation stability control solutions, the system cost cannot be fundamentally controlled. Therefore, the application and promotion of products are also subject to (2) At present, the domestic mobile communication development manufacturers are mainly traditional
microwave communication research institutes. The professional expertise of these institutes is mainly the design of antenna systems and communication links. The research on the tracking
control system is generally relatively little, and the technical core and key of the antenna in motion is the high-precision real-time
motion measurement and
servo tracking control system. Therefore, the stabilization effect and real-time tracking accuracy of the antenna in motion that have been successfully developed Performance indicators such as adaptability to sports conditions are not very ideal
[0007]
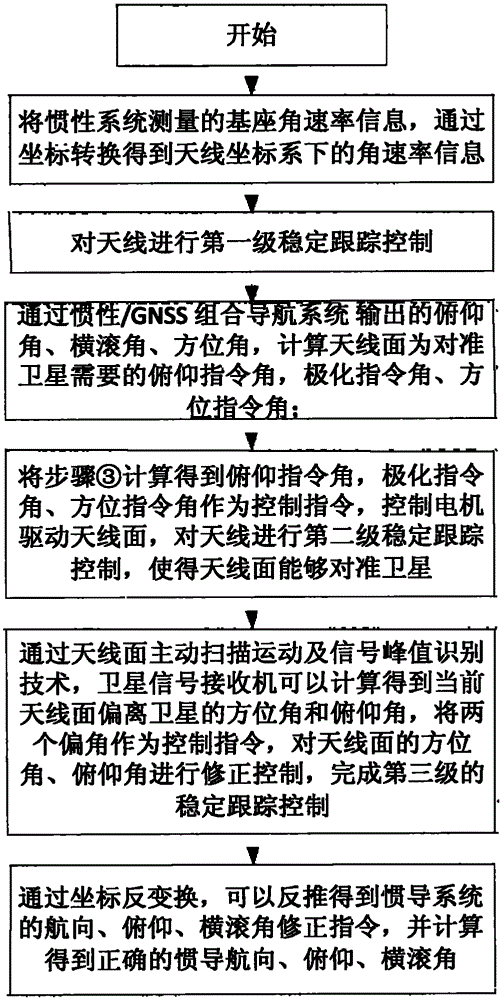
Motion sensing and
feedback control are the basis of satellite antenna system pointing stability and real-time high-precision tracking. Traditional antenna stabilization tracking systems often have three solutions: The first control scheme is a combination of gyro angular rate feedback and satellite signal scanning The implementation of this scheme is relatively simple, with
high bandwidth and real-time performance, but there are often three problems as follows: 1. The system is only based on angular rate tracking and signal
feedback control, and does not introduce the concept of attitude angle and
azimuth angle. Once the satellite is not tracked, it will be very difficult to find the star again. At the same time, due to the existence of gyro drift, it is more difficult to find the star and recapture the lost star under dynamic conditions; 2. The drift of the low-cost MEMS gyro makes the pointing accuracy of the system It is difficult to be guaranteed, and if high-precision gyro is used, the cost is also difficult to control; 3. The frequency of satellite signal scanning is relatively low, generally not exceeding 1Hz. When there is an error in angular rate tracking, it is often difficult to rely solely on satellite signal scanning and tracking Can not ensure a good tracking effect, the overall tracking accuracy of the system is not high, especially on bumpy road sections, continuous turns, etc., the tracking performance of the system will be greatly reduced, and it is generally difficult to meet
user needsThe second control scheme is a scheme that combines gyro angular rate feedback and monopulse tracking. This scheme also has
high bandwidth and real-time performance as the first scheme, but the problems 1 and 2 described in scheme 1 are the same In addition, the monopulse
receiver is a
microwave signal processor designed based on the principle of satellite
signal strength and phase comparison, which can output the
tracking error angle of the antenna in real time and with
high bandwidth. The system can ensure a good tracking effect, but the monopulse
receiver The
microwave network and circuit system of the
machine are very complicated, the cost is very expensive, and it is difficult for ordinary users to bear; the third control scheme is based on the attitude feedback scheme of the high-precision
inertial navigation system, which directly adopts the attitude angle and azimuth angle
feedback control, The antenna pointing angle is relatively accurate, but because the output of the attitude angle and azimuth angle is one frame slower than the angular rate, the timeliness of the system has declined. At the same time, in order to obtain higher-precision attitude measurement information, it is generally necessary to use high-precision
optical fiber or
laser Inertial navigation system, the cost of the system is extremely expensive




 Login to View More
Login to View More  Login to View More
Login to View More