Stepping motor position controller based on CPLD
A stepping motor and controller technology, applied in the direction of motor generator control, control system, electrical components, etc., can solve the problems of large step angle and limited application, etc., achieve improved reliability, small accumulated errors, and accelerated development speed Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
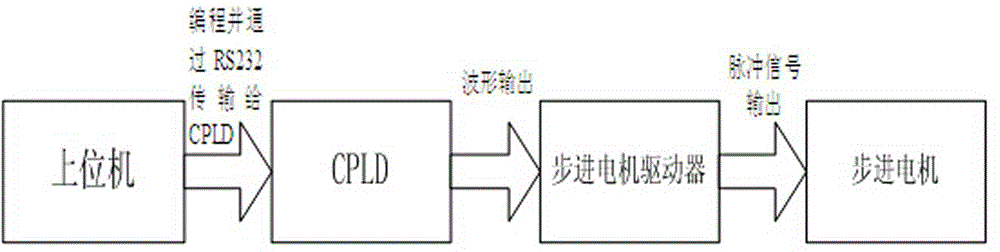
[0018] combine figure 1 , figure 1 It is a system principle structure diagram of the present invention;
[0019] A CPLD-based stepper motor position controller, which is composed of a host computer, a controller, a stepper motor driver and a stepper motor, the host computer is connected to the controller, the controller is connected to the stepper motor driver, and the stepper motor driver is connected to stepper motor.
[0020] The upper computer and the controller are connected through the RS232 serial port.
[0021] The controller adopts CPLD.
[0022] Described CPLD outputs three signals of pulse signal PUL, direction signal DIR and potential energy signal ENA to the stepper motor driver; After the ring distributor of the stepper motor driver receives the signal, the signal is distributed to the stepper motor driver according to certain rules Each output terminal controls the conduction and cut-off of the excitation winding; the signal of each phase conduction or cut-o...
Embodiment 2
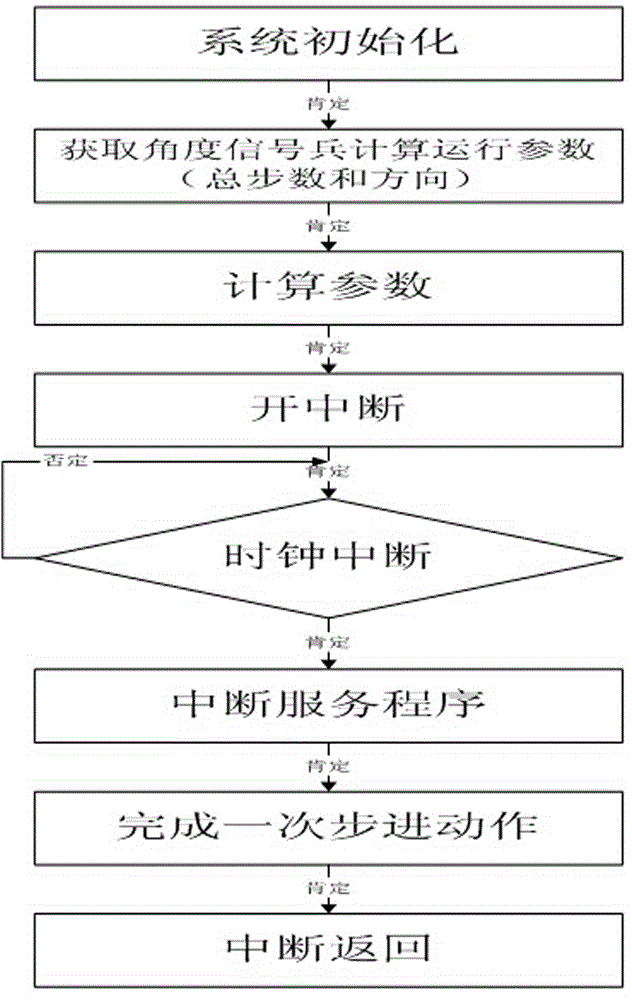
[0024] figure 2 It is a system program flow chart of the present invention;
[0025] When the system is powered on, the system initialization starts, mainly including the initialization of the controller and the initialization of the initial conditions of each system; then obtain the total number of steps and direction information of the stepper motor angle signal and calculate the operating parameters; open the clock interrupt and enter the interrupt service program, the signal is sent to the stepper motor driver, and the motor is driven to complete a stepping action.
Embodiment 3
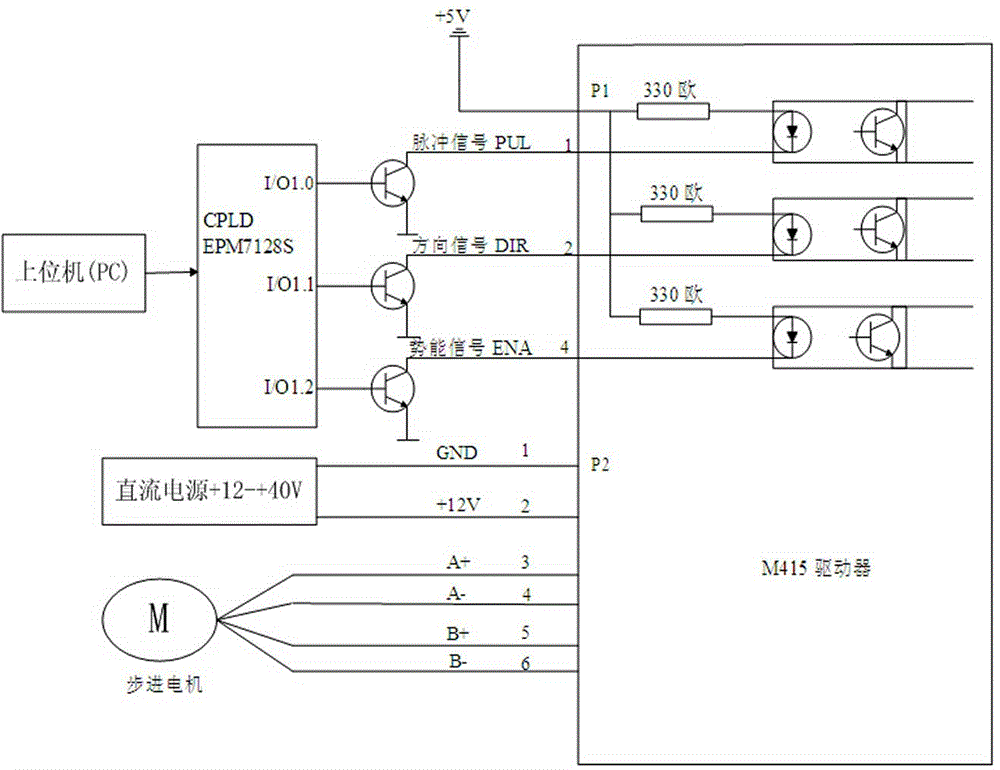
[0027] image 3 It is a schematic circuit diagram of the control system of the present invention;
[0028] Connect the serial port of the PC to the CPLD through the data cable attached to the CPLD, and connect the host computer to the CPLD through the RS232 serial port. The CPLD receives and outputs three signals through the interface I / O1.0, I / O1.1, I / O O1.2 is transmitted to the stepper motor driver, where the power supply is connected to the P2 port of the stepper motor, and finally the processed signal is transmitted to the stepper motor.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com